|
Raději pro mapky pohybu Zhurongu zakládám sousední vlákno, aby nezabíraly místo jiným příspěvkům, jako to mají na fóru usf. Chtěl bych tímto i poprosit Aleše, aby mapky v China Mars 2020 přesunul sem.
Pokud najdu čas, když rover někam popojede nebo se dostanu k přesnější informacím, rád bych sem dával dva druhy mapek. Jednu podrobnou černobílou v té verzi, jako je ta poslední z 18.8. Ta je v měřítku 1:1400 a pak přehledovou, aby bylo vidět, kam asi rover směřuje. Ta je v měřítku 1:14000.
Co se týká přesnosti mapek, tak se snažím, aby byly co nejpřesnější, ať už v trase roveru, tak i souřadnic a elevací. Nejlepším zdrojem jsou snímky HiRISE, kde je dobře vidět stopa roveru. Ty mapky CNSA mi nepřipadají zrovna nejpřesnější, tam má stopa šířku 6m. Také mi vycházejí pootočené o 0.1° vzhledem k souřadnému systému CTX a ještě jsem narazil i na nesrovnalost v poloze roveru. Jedná se o polohu, kde je snímek padáku se zadním krytem. Triangulací polohy padáku, zadního krytu a útvaru objektů na obzoru mi vyšla trochu jiná poloha (mapka v příspěvku 18.8.). Ta se nekryje ani s trasou roveru, ani co se týká jeho zastávek (zelené puntíky jsou na mé mapce bílá kolečka 1 a 2). Ale to uvidíme na příštím snímku HiRISE, který by měl snad být v dohledné době, jestli jsem se někde něco neudělal špatně, což se mi stává. Na určitou nesrovnalost s posledním snímkem CNSA upozorňuje i Philip Stooke na usf, což je profesně planetární kartograf.
Jestli je nějak posunutá nebo pootočená ta poslední mapka CNSA, kde jsou souřadnice, jsem ještě nekontroloval, mám to v plánu někdy v příštích dnech. Odečtem mi z ní vycházejí souřadnice místa přistání TW-1 109.9251°E a 25.0662°N v areocentrických souřadnicích. Souřadnice, které vyšly mně (mapka z 18.8) se v šířce naprosto shodují s mapkou CNSA a v délce mám v souřadnicích posunutí o 0,00014° východně, což je vzájemné posunutí obou souřadnicových systémů v délce pro 25° šířky necelých 8 m za předpokladu, že mapka CNSA je přesná.
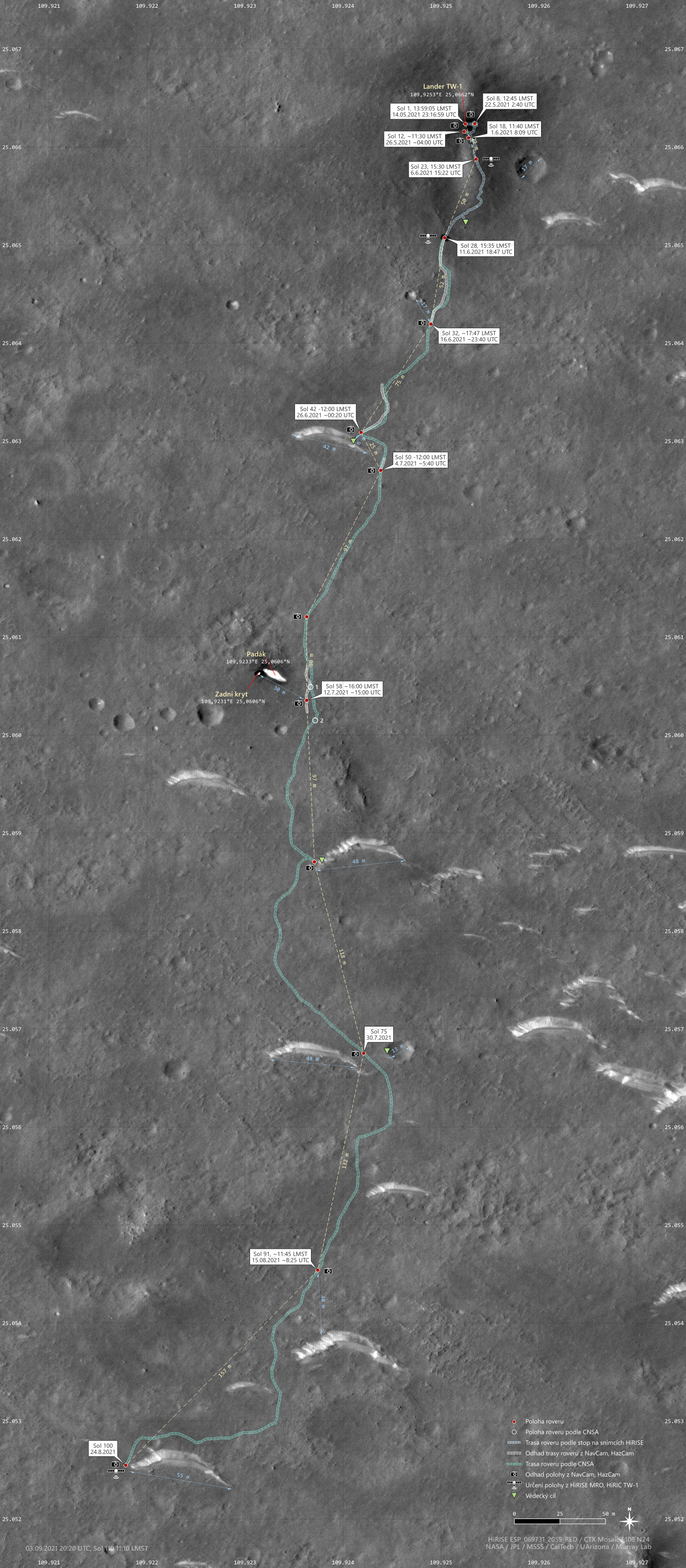
Nakonec ještě přehledová mapka pohybu roveru k dnešnímu dni. Vrstevnice mají interval 2 m. Tu podrobnou černobílou mapku sem zatím dávat nebudu, protože tam ještě nemám opravené časy, o kterých jsem se nedávno zmínil.
 |
|
| Některé "mapové" příspěvky jsem zkušebně přesunul do tohoto vlákna, ale protože to dost rozhodilo smysl navazujících diskuzí, tak jsem to po dohodě s Honzou zase vrátil. Nové mopy ale už patří sem. |
|
Aktualizovaná podrobná mapka s pohybem roveru. Mám ale takovou malou poznámku ke stopě roveru od CNSA.
Uveřejněný snímek pořízený kamerou HiRIC, který zachycuje oblast pohybu roveru a je na něm dobře patrná jeho stopa, nejde uspokojivě překrýt se snímkem HiRISE. Snímek je nějakým způsobem zkreslený, což naopak mapka od CNSA jde překrýt dobře. Jenomže když ten snímek z HiRIC lokálně překryji s mapkou CNSA tak, že se mi alespoň v nejbližším okolí překrývají okolní útvary, tak stopa roveru ze snímku se často nekryje se stopou na mapce CNSA a místy je hodně mimo, takže to vypadá, že je malovaná „tak nějak od oka“. Proto je potřeba tuhle mapku, kterou sem dávám, brát spíš jenom jako orientační. Mapku s přesným pohybem roveru udělám, až bude snímek z HiRISE.
|
|
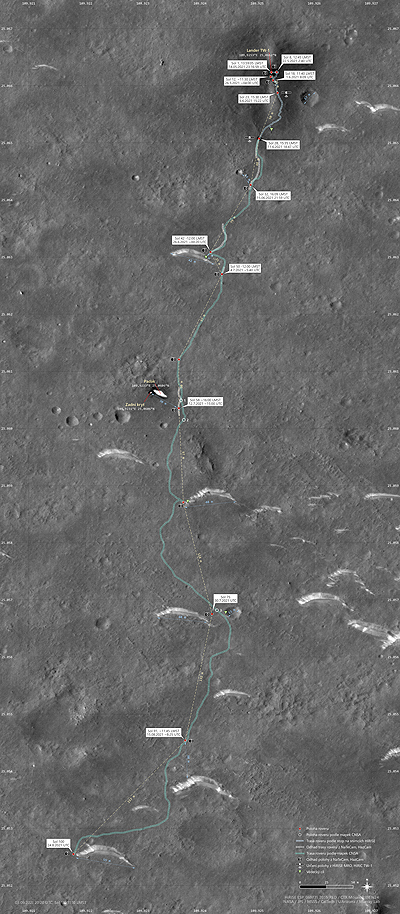
Aktualizovaný výškový profil trasy roveru k 24.8. Profil trasy odpovídá trase znázorněné na mapce CNSA. V té předchozí mapce jsem se snažil upřesnit pohyb roveru podle snímku z HiRIC, ale jak jsem už psal výše HiRIC a HiRISE nejdou překrýt a rozcházejí se, takže je to na nic. K výškovému profilu tedy přikládám i odpovídající mapku trasy podle CNSA.

 Zvětšit Zvětšit 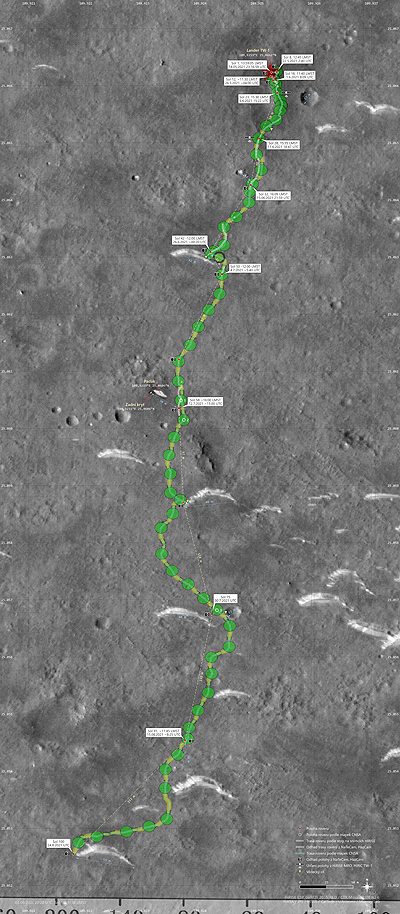 Zvětšit Zvětšit
[upraveno 8.9.2021 12:16] |
|
Trochu mě zajímalo, co je vlastně napsané v té legendě u mapek CNSA s vyznačenou trasou roveru. Důvod byl ten, že na mapce je trasa vyznačena dvojím druhem čar. Žlutou a světle zelenou.
http://www.cnsa.gov.cn/n6758823/n6758838/c6812429/part/6787575.png
Za pomoci OCR by překlad legendy by měl být následující:
图例 – legenda
着陆点 – místo přistání
导航点 – navigační bod
盲走移动路线 – jízda naslepo
自主避障路线 – autonomní jízda s detekcí a objížděním překážek
Ta jízda naslepo nejspíš funguje tak, že ze snímků z NaTeCam se v navigačním bodě určí trasa a ta se naprogramuje do roveru. Tuto část trasy pak rover jede podle programu. Teprve ve větší vzdálenosti se zapíná autonomní systém a podle toho se řídí. Důvodem může být jednak spotřeba energie, protože to vypadá, že rover energií hodně šetří, a pak to může být i rychlost pohybu. Podle té naprogramované trasy se určitě bude pohybovat rychleji, než když si sám vyhledává cestu. Ta jízda naslepo má v průměru délku kolem 10 m. Je to tedy nejspíš vzdálenost, do které se podle NaTeCam dá vyhodnotit a určit trasa jako bezpečná. Ve větší vzdálenosti pak už rover jede autonomně. Alespoň tak si tu jízdu naslepo představuji, možná nepřesně nebo úplně špatně.
[upraveno 17.9.2021 19:17] |
|
S trochu větším zpožděním sem dávám snímek z HiRIC se stopou roveru zakomponovaný do mapky trasy. Zpoždění je proto, že jsem neměl nervy na to, abych HiRIC uspokojivě zarovnal ke snímku HiRISE, který nám jako základ mapky. HiRISE jsou focené v odpoledních hodinách LMST, ale HiRIC je pořízený někdy dopoledne LMST, takže všechny útvary na povrchu jsou nasvícené sluncem z druhé strany a vypadají proto trošku jinak. Na HiRIC se stopou ani nejsou vidět žádné povrchové detaily kromě dun a stopy roveru, a je i v nějaké jiné projekci než HiRISE, protože ke stranám se stále více rozjíždí. Snímek bylo potřeba proto znovu reprojektovat a to díky těm chybějícím detailům se mi nedařilo. Vrátil jsem se k tomu až po delší době a asi na desátý pokus se to nakonec uspokojivě povedlo.
Na mapce je vidět, jak se stopa rozchází se stopou mapek CNSA podle které mám stopu namalovanou. Čím dál od místa přistání, tím je odchylka větší. V té spodní části mapky je odchylka až 11 m. Moc nerozumím tomu, proč to tak je, a ani tomu proč pro základ mapky CNSA nepoužívá aktuální snímek z HiRIC, ale nějaký starší snímek pořízený ještě před přistáním.
 Velký obrázek Velký obrázek
[upraveno 2.10.2021 19:29] |
|
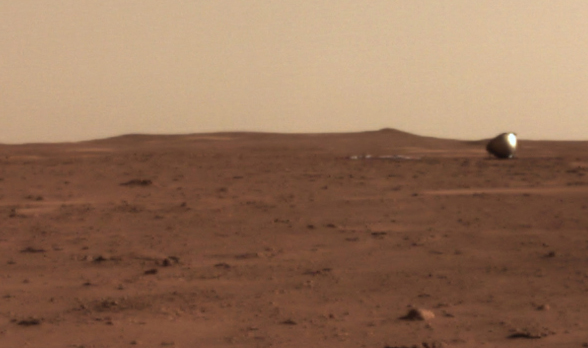
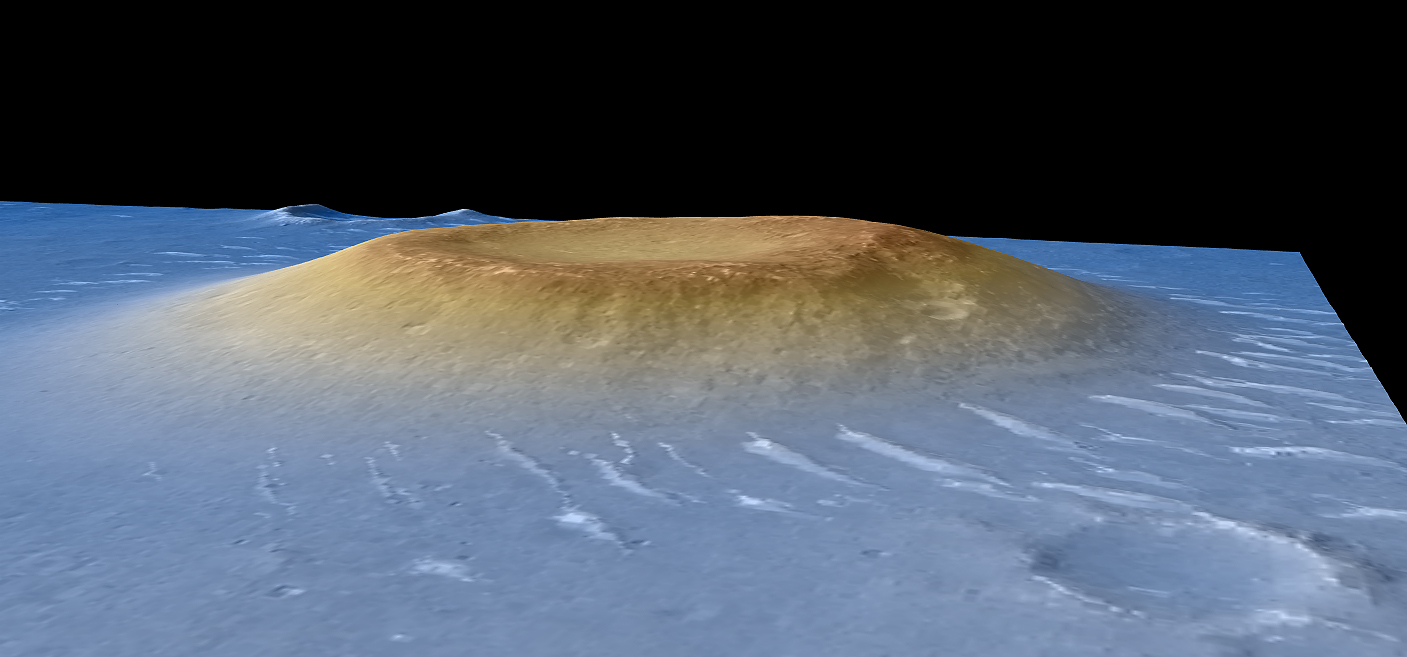
3D pohled na plochý kopec, který je na snímcích z roveru dobře vidět na obzoru, už tady byl. Na jižním obzoru je sice ne tak výrazná, ale přesto dobře viditelná, také jedna dominanta. Je to veliký kráter na jihu a jeho zejména západní val je, dobře viditelný.
Pohled ze severozápadu
A takhle vypadá ve 3D.
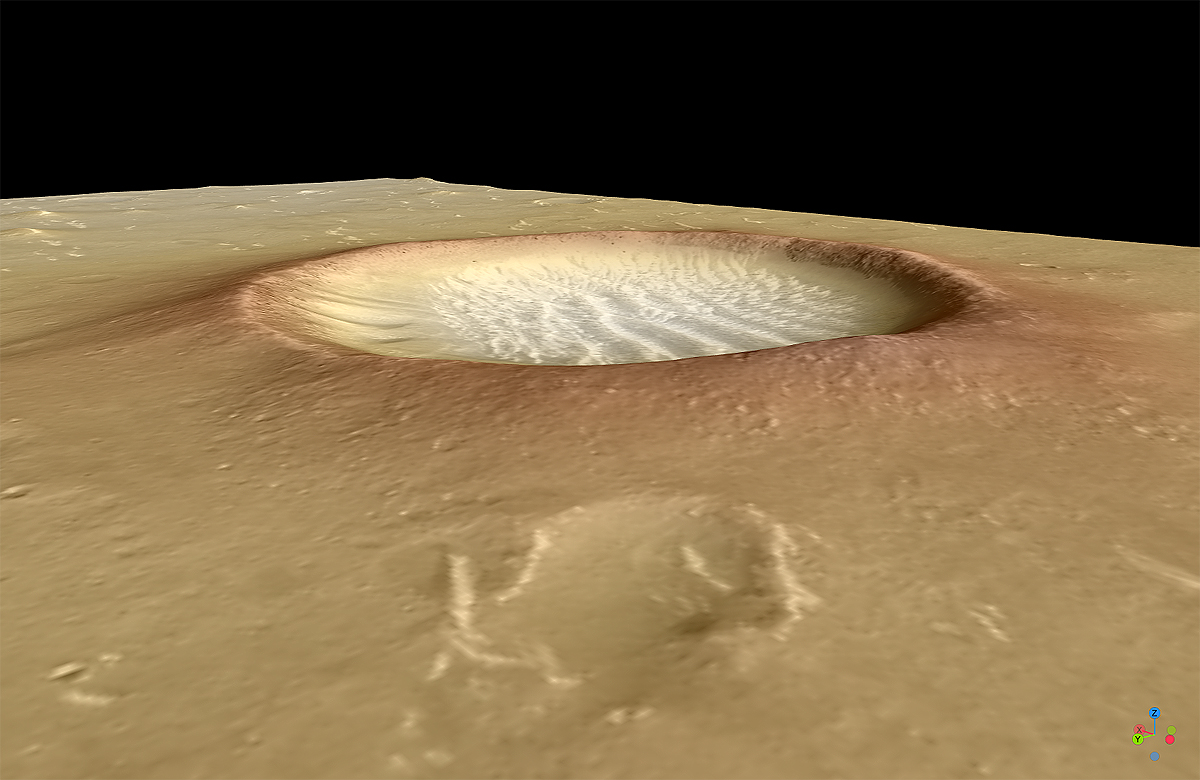
Pohled ze severozápadu
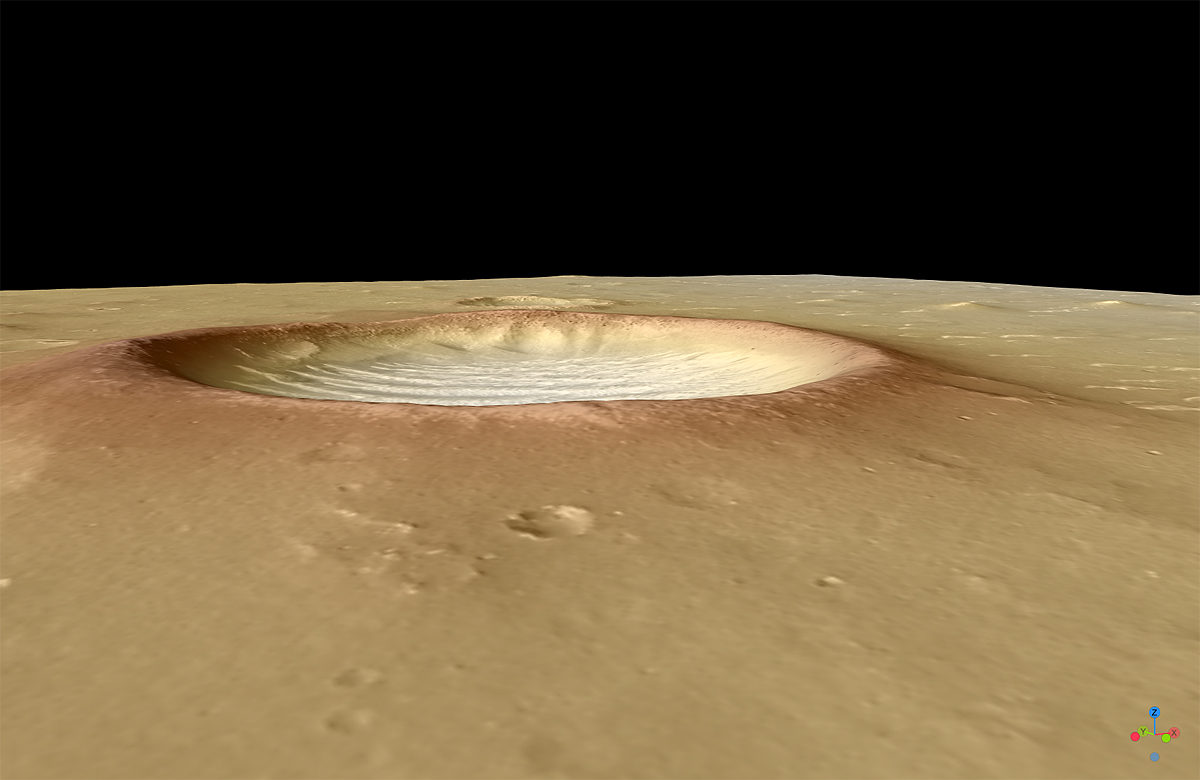
Pohled přibližně z jihu přibližně směrem k roveru [upraveno 7.10.2021 00:04] |
|
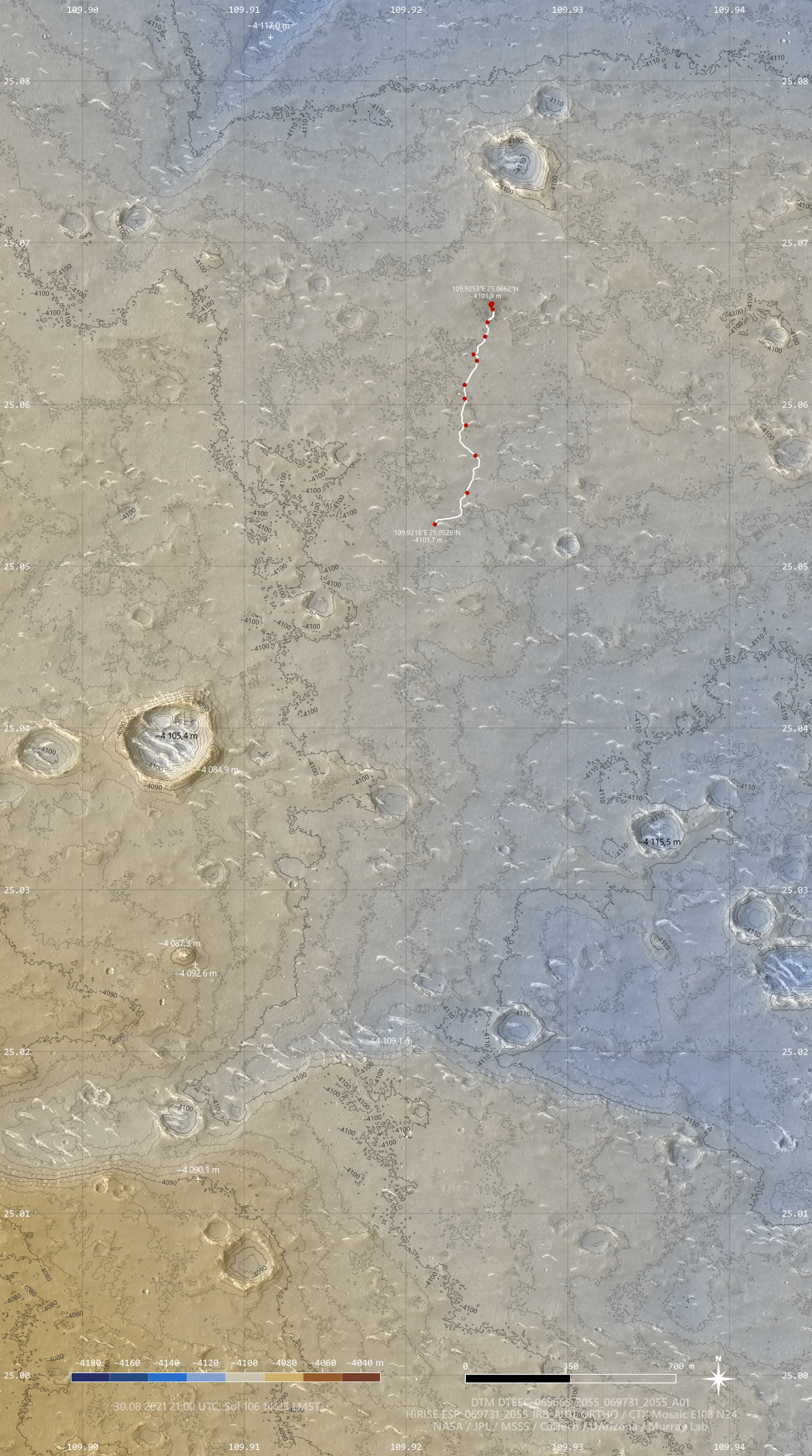
3D pohled na oblast místa přistání. Vertikální měřítko, je zvýrazněno 5x, aby to nebyla úplná placka
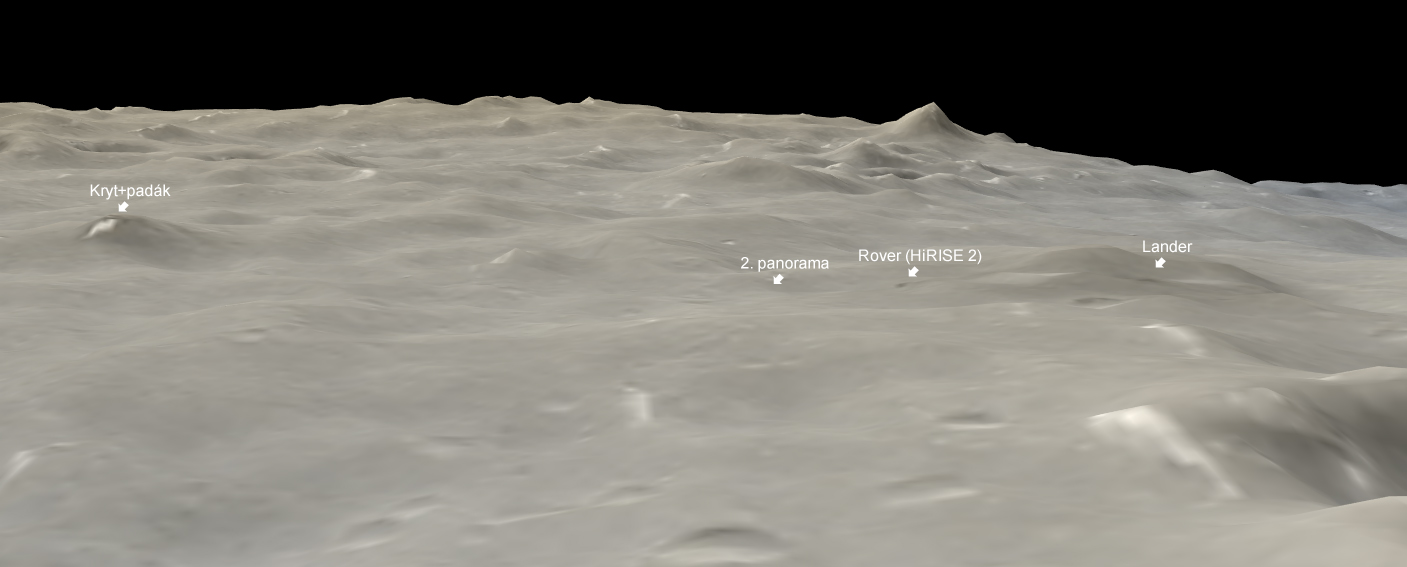
[upraveno 7.10.2021 02:12] |
|
A jenom pro úplnost ještě ten kopec, když už jsem sem dal kráter na jihu
 |
|
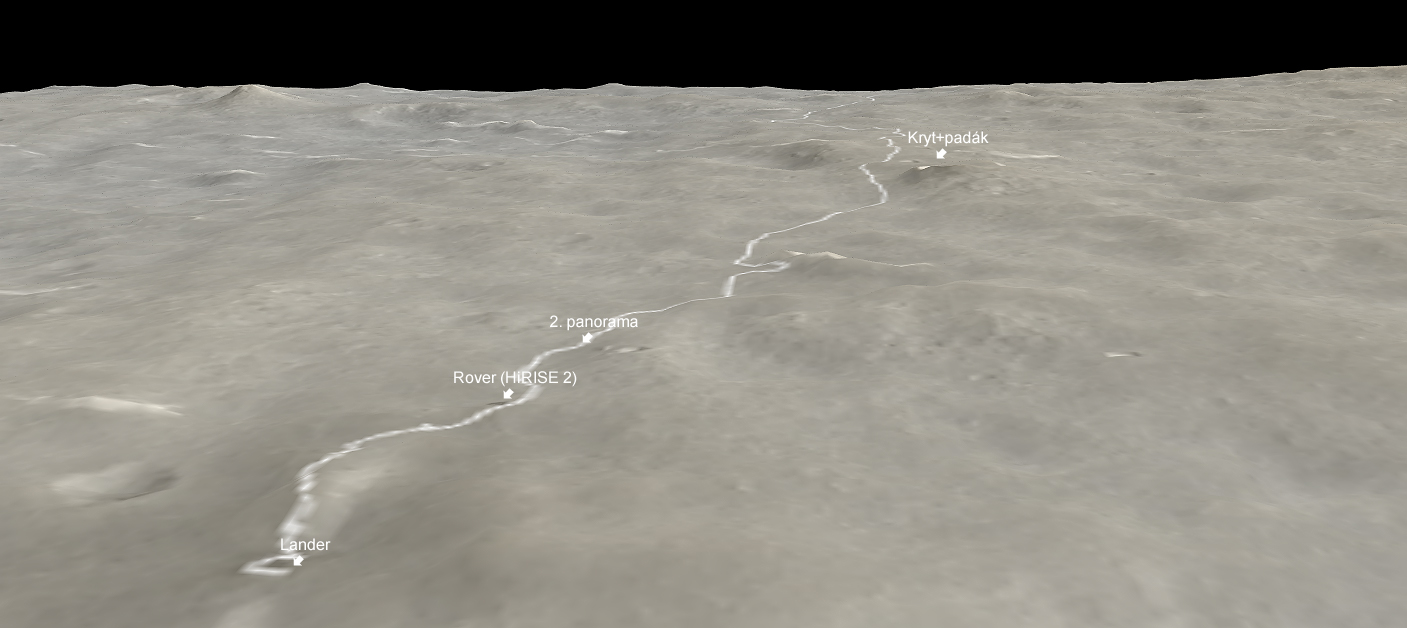
Ještě jeden 3D pohled na oblast přistání. Tentokrát od severu a i s vyznačenou trasou
 |
|
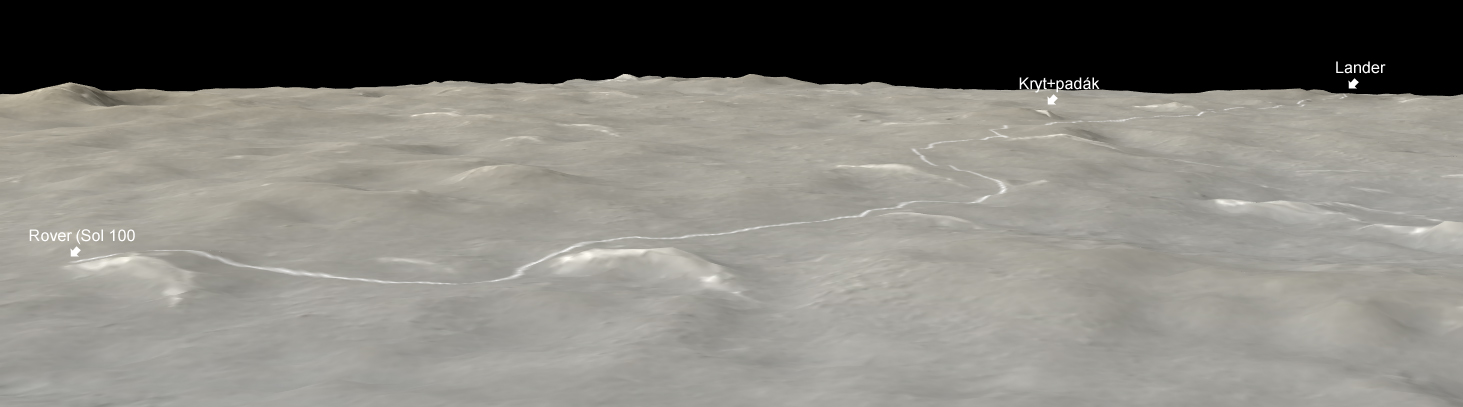
A pohled na celou trasu od jihu
 |
|
Dosavadní trasa roveru s pohledem na celou oblast.
 Velký obrázek Velký obrázek |
|
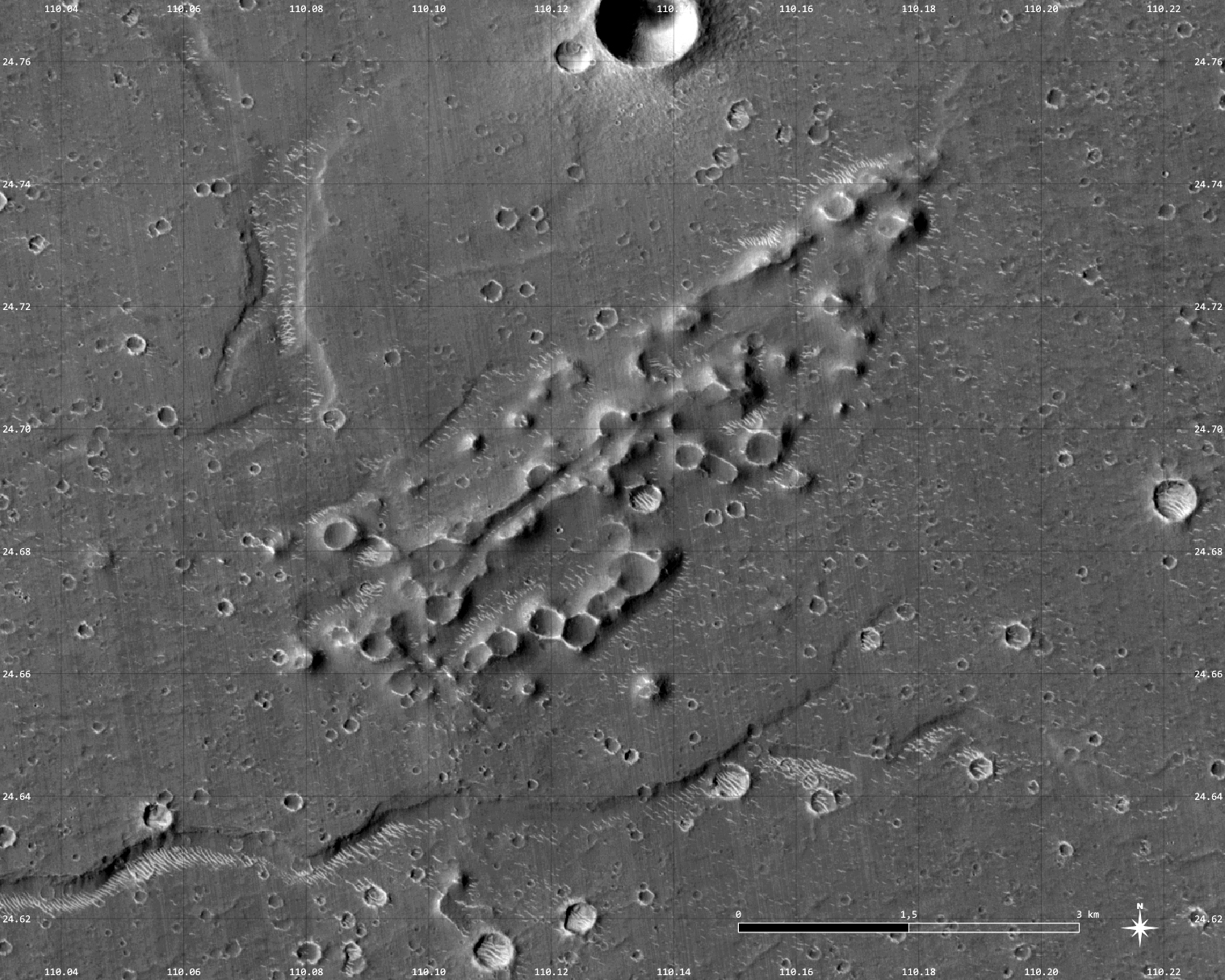
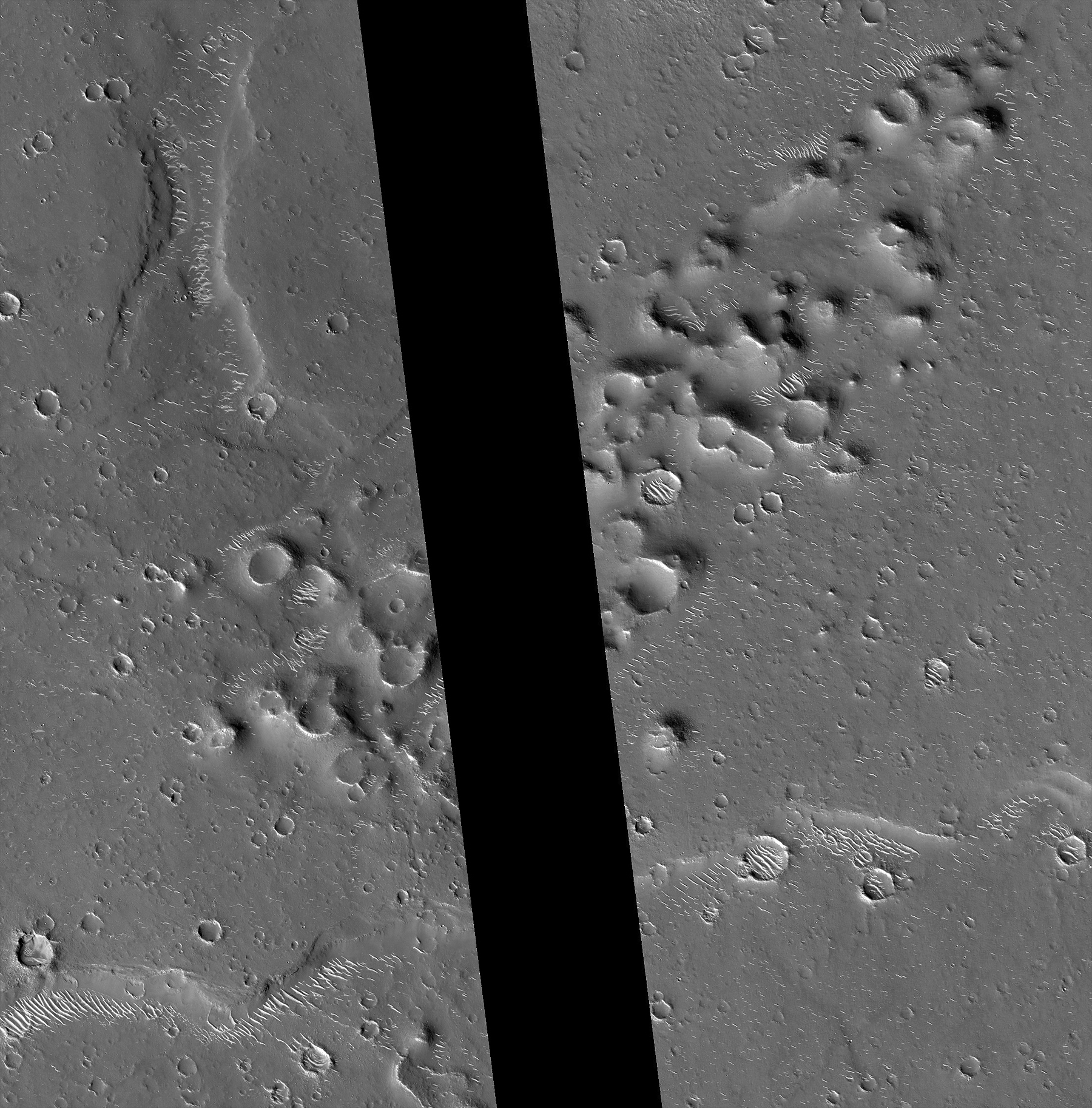
Pohled na zmiňovanou brázdu (koryto/žlab - tady nevím, jaká je ta správná terminologie pro tento útvar) se sedimenty z videa, kde to nazývají "hromadou písku".
 Velký obrázek Velký obrázek |
|
Detailnější pohled na oblast, kam by chtěli s roverem dojet. Předpokládá se, že některé povrchové útvary v této oblasti by mohly mít původ v bahenním vulkanismu.
 |
|
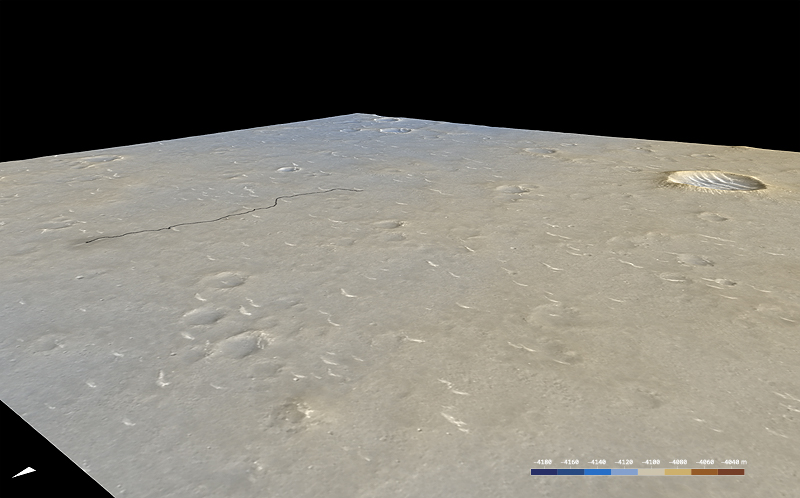
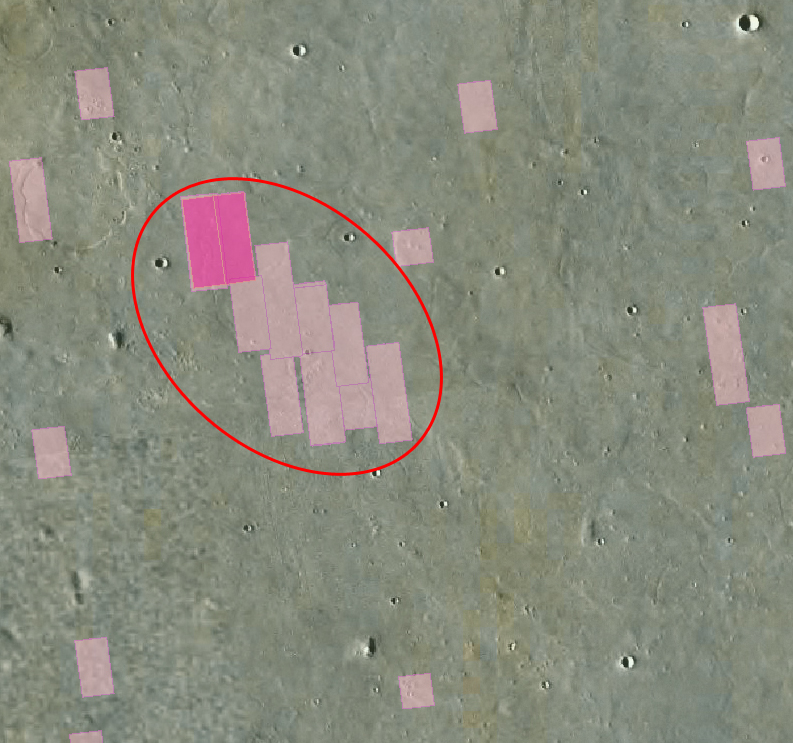
Jenom taková zajímavost, na kterou jsem dneska narazil, když jsem něco hledal. Kamerou HiRISE se snímkují pouze vybraná místa a snímky zdaleka nepokrývají celý povrch Marsu, na rozdíl od snímků z kamery CTX. Nicméně až na úzký proužek, pokrývají snímky HiRISE celou předpokládanou trasu roveru Zhurong od místa přistání až k bahenním sopkám na jihovýchodě. Ty tmavé obdélníčky jsou HiRISE DTM.
 |
|
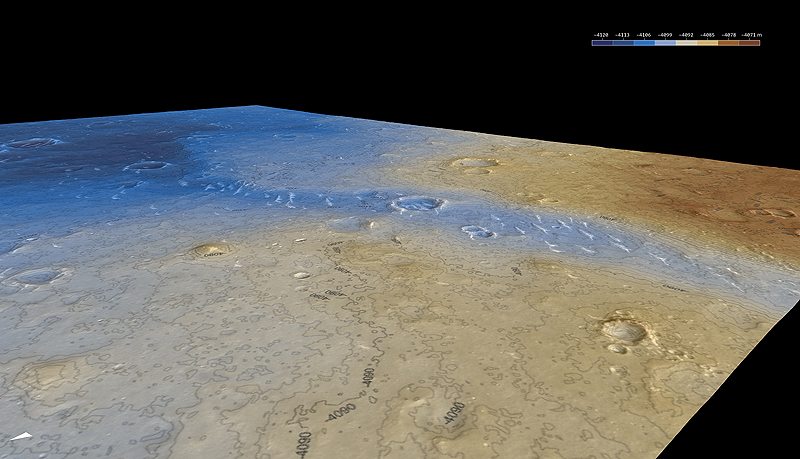
Ještě jednou cílová oblast Zhurongu, tentokrát ale ze snímků HiRISE. Z té malé předchozí mapky je vidět, že tam chybí proužek oblasti, kde snímek chybí. Tady se přiznám, že tu mezeru jsem střelil tak trochu od oka, protože tyhle snímky ještě nemám zarovnané do mapy, takže se omlouvám jestli ta mezera nemá odpovídající šířku.
 |
|
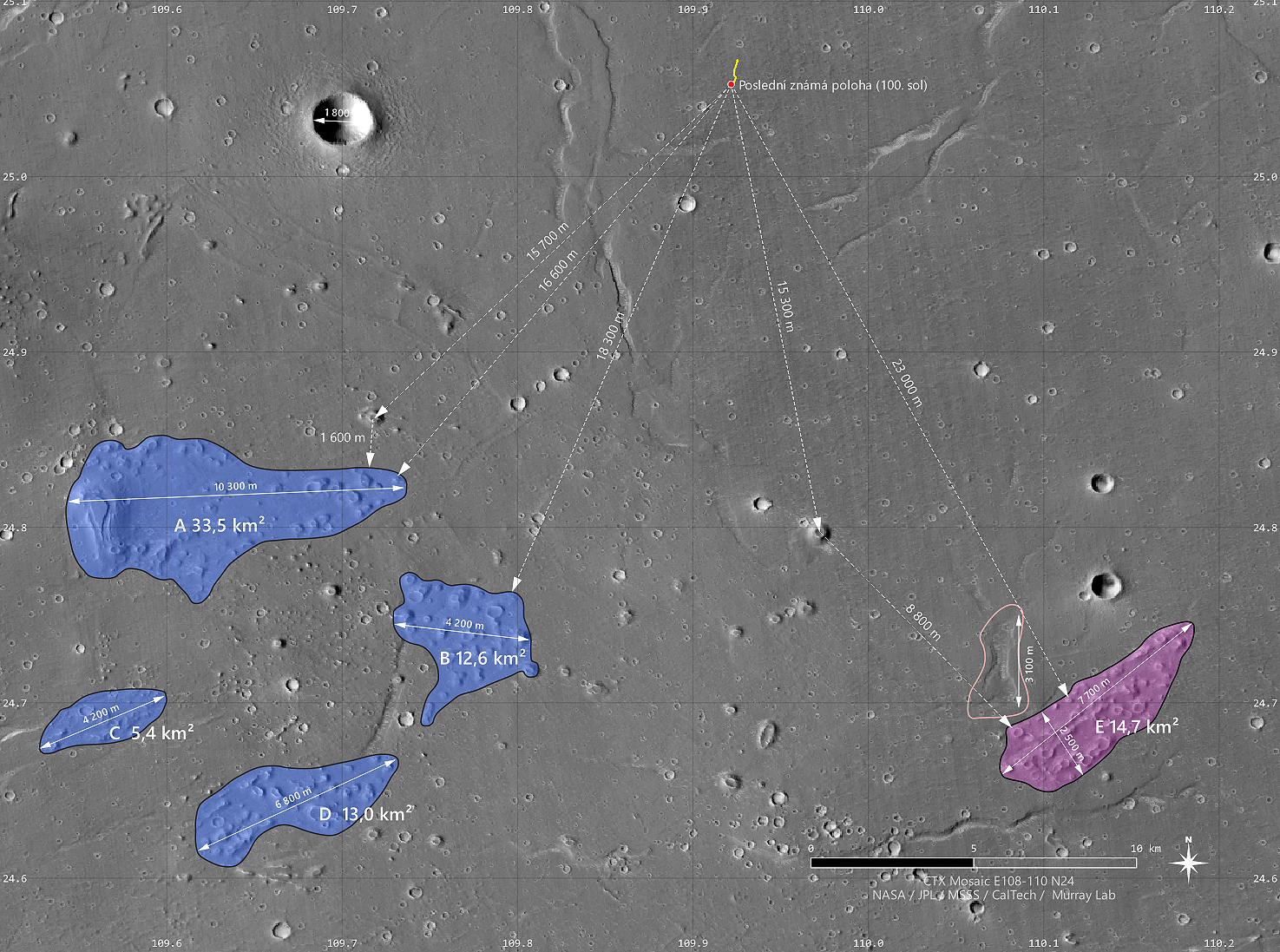
Jižně od současné polohy roveru, je v dosahu do 25 km celkem pět míst s vysokou hustotou výskytu vulkanických útvarů. Čtyři leží směrem jihozápadně (označené A, B, C , D) a jedno označené písmenem E je jihovýchodním směrem. Jak zde již bylo uvedeno, toto místo si podle dosavadních informací vybral tým roveru jako dlouhodobý cíl.
Snad se časem dozvíme, proč chtějí jet zrovna do E, ačkoliv budou potřebovat zhruba rok cesty navíc, než kdyby vyrazili např. do A nebo B. Jediné, co se poblíž ještě nachází, je označená velká deprese severozápadně.
 |
|
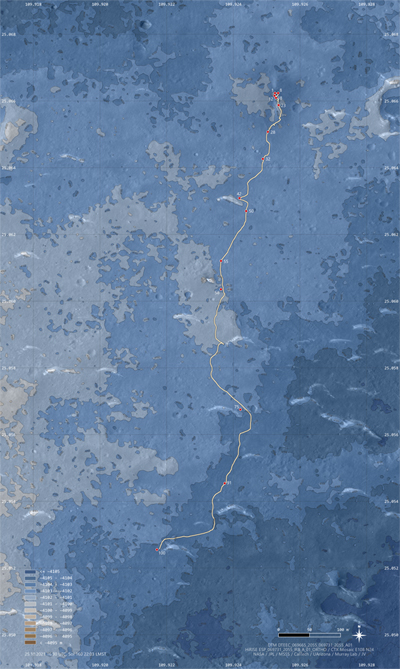
Tentokrát se dám trošku jinou mapu. Rover Zhurong se může pohybovat po povrchu se sklonem do 30° pro pevný povrch a do 20° pro měkčí povrch. Následující mapa ukazuje, jak to vypadá se sklonem terénu v oblasti, kde se rover pohybuje.
 Větší mapa Větší mapa
Mapa je vytvořená z HiRISE DTM pomocí DEM vrstvy. |
|
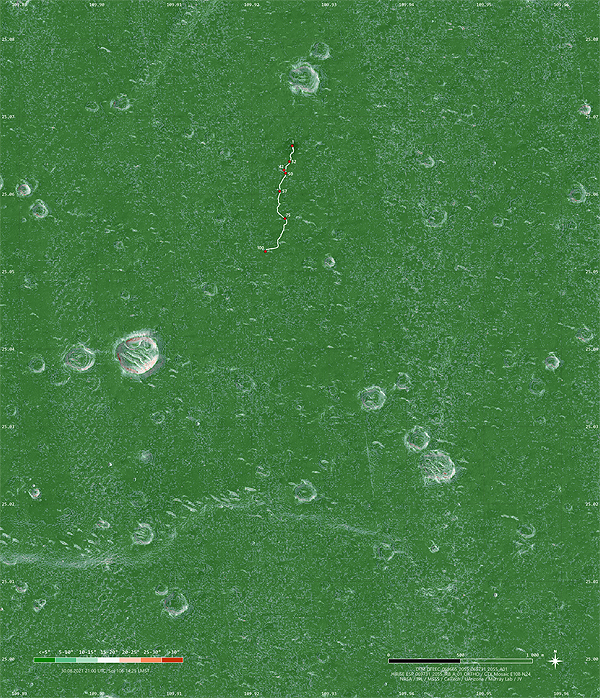
Před nedávnem tady byl graf s výškovým profilem trasy roveru. Z něho není ovšem vidět, jak to vypadá s elevacemi terénu v nejbližším okolí trasy roveru. To moc není vidět ani na té přehledové mapce širší oblasti, kde se rover pohybuje. Dávám sem tedy podrobnější topografickou mapku. Vrstevnice i barvy elevací mají interval 1 m.
 Větší mapa Větší mapa
Stopa roveru je udělaná podle mapek CNSA, která není moc přesná, proto některé polohy roveru, kde opravdu byl, leží mimo trasu. |
|
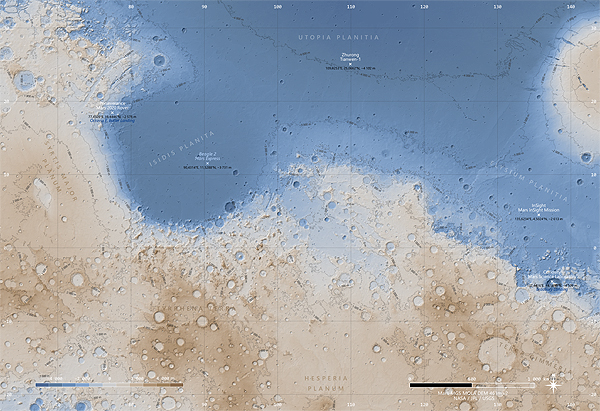
Mapa okolí oblasti Utopia Planitia, ale tu už většinou znáte.
 Větší mapa Větší mapa |
| 31.10.2021 - 08:29 - MiraH | |
|
citace 30.10.2021 - 22:59 - Honza Vacek:
Mapa okolí oblasti Utopia Planitia, ale tu už většinou znáte.
Mám rád tento druh map. Jsou tak krásně přehledné. Místo přistání vozítka Zhurong [Ču-žung] je prostě rovina. S tím se nedá nic dělat. |
|
citace 31.10.2021 - 08:29 - MiraH:
Mám rád tento druh map. Jsou tak krásně přehledné.
To já také  . MOLA byl experiment, který se opravdu povedl. Jinak data z měření MOLA také slouží k praktické realizaci souřadného systému Marsu IAU 2000. Všechny snímky povrchu Marsu se pak zarovnávají (georeferencují) k souřadnému systému MOLA. Postup je zhruba následující MOLA->HRSC->CTX->HiRISE. Nejdříve se tedy zarovnají k MOLA snímky HRSC, k zarovnaným snímkům HRSC se zarovnají snímky CTX a k nim pak HiRISE. Zarovnat snímky HiRISE k přesně k souřadnému systému je tedy poměrně náročný proces. Např. HiRISE na Google Mars často zarovnané nejsou a je na nich vidět zřetelný posuv vzhledem k CTX. Je to dobře vidět např. u místa přistání Opportunity. . MOLA byl experiment, který se opravdu povedl. Jinak data z měření MOLA také slouží k praktické realizaci souřadného systému Marsu IAU 2000. Všechny snímky povrchu Marsu se pak zarovnávají (georeferencují) k souřadnému systému MOLA. Postup je zhruba následující MOLA->HRSC->CTX->HiRISE. Nejdříve se tedy zarovnají k MOLA snímky HRSC, k zarovnaným snímkům HRSC se zarovnají snímky CTX a k nim pak HiRISE. Zarovnat snímky HiRISE k přesně k souřadnému systému je tedy poměrně náročný proces. Např. HiRISE na Google Mars často zarovnané nejsou a je na nich vidět zřetelný posuv vzhledem k CTX. Je to dobře vidět např. u místa přistání Opportunity.
Mapka se vzdálenostmi mezi jednotlivými sondami
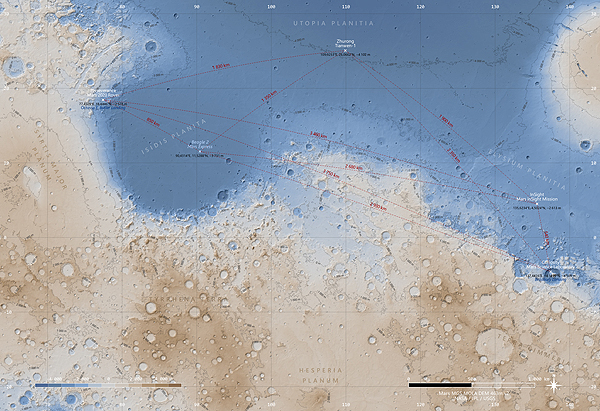 Větší mapa Větší mapa |
| 31.10.2021 - 11:26 - MiraH | |
|
Když se tak na ty mapy dívám, tak ty planiny (Utopia, Isidis, Elysium) jsou dost hluboké. Pokud to někdy bylo zatopeno vodou, tak moře hluboké 4 km je už docela slušný oceán.
3 funkční vozítka na "relativně" malém území. |
|
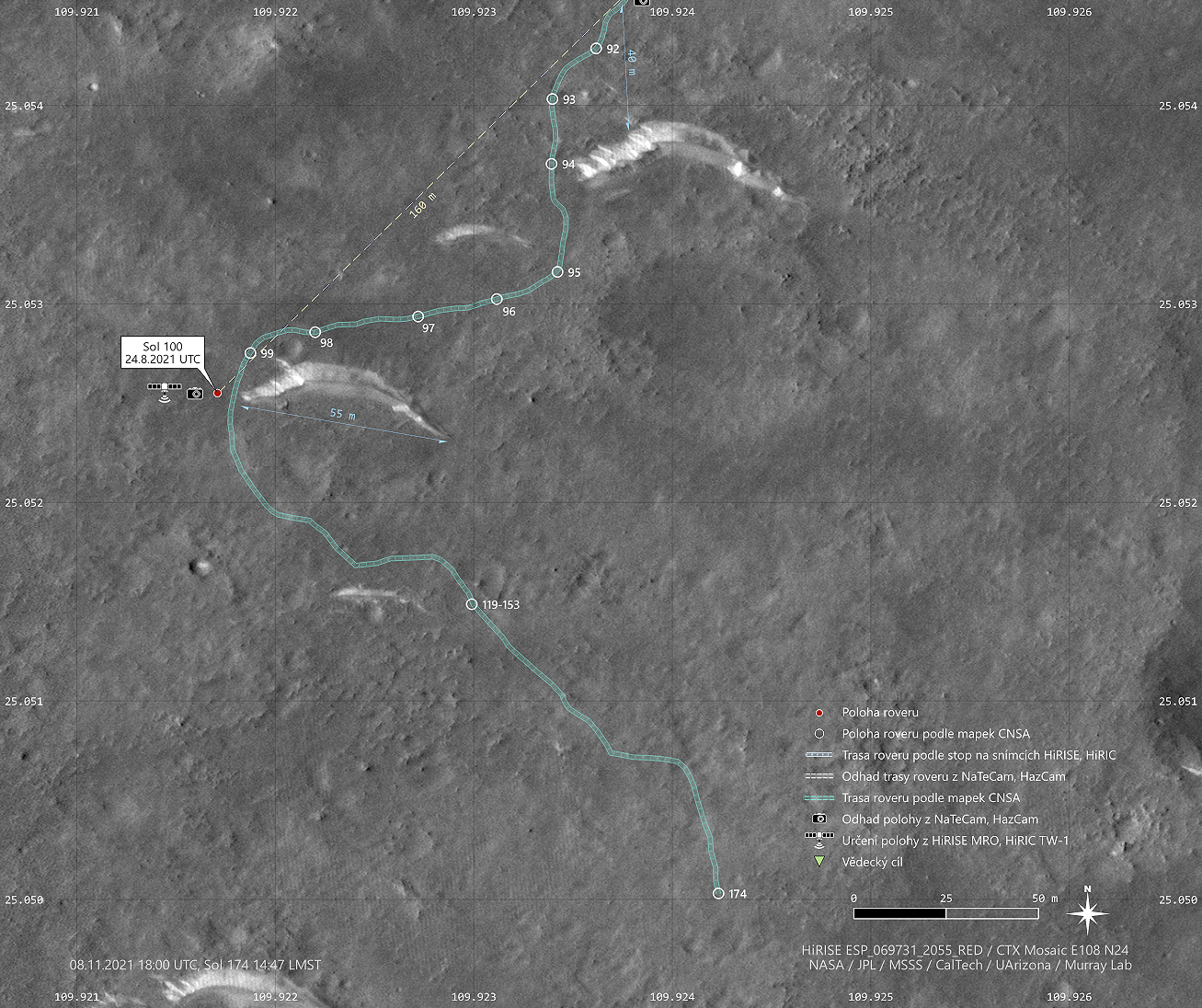
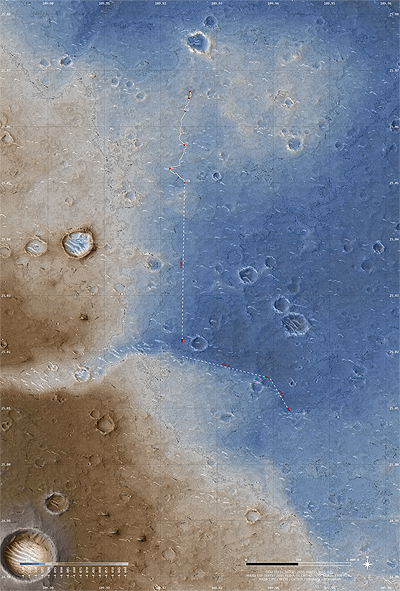
Aktualizovaná mapka pohybu roveru.

Z posledních zveřejněných snímků o pár příspěvků výše mi zatím vychází, že rover přečkal sluneční konjunkci v místě, které je předběžně označené jako 119-153. |
|
Ještě aktualizovaná mapka širšího okolí, aby bylo vidět, kam Zhurong asi míří.
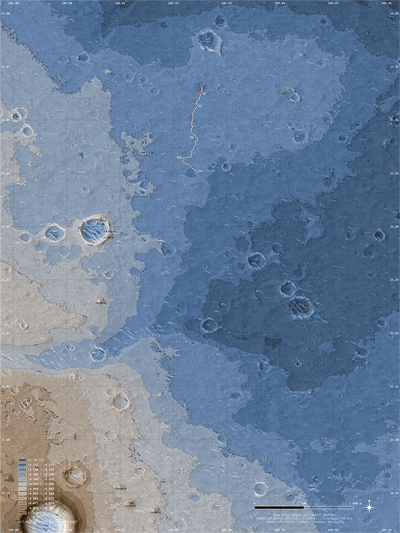 Mapa v plném rozlišení Mapa v plném rozlišení |
| 20.11.2021 - 00:47 - Machi | |
|
citace 9.11.2021 - 10:30 - Honza Vacek:
Ještě aktualizovaná mapka širšího okolí, aby bylo vidět, kam Zhurong asi míří...
Díky za mapky, jsou velmi informativní!
Výborná práce! |
|
| Machi, díky za uznání. Snažím se, aby mapky byly trošku jiné a přinášely i jiné informace, než mapky, kterých lze na internetu najít celou řadu. Ale jsem si také vědom toho, že ne vždy se to povede. Díky. |
|
Tento tweet odkazuje na článek v Nature Astronomy, ve kterém byl představen plán cesty roveru Zhurong. Nyní směřuje přímo na jih k východnímu ústí koryta, které by mělo být vyplněné sedimenty. Poté zamíří jihovýchodním směrem podél jižního břehu koryta a po necelém kilometru se stočí ještě více na jih. Tím směrem je vulkanická oblast s možným výskytem bahenních sopek. Článek tak potvrzuje předchozí informace o možném směřování roveru.
 Velká mapa Velká mapa |
|
Aktualizovaná mapka pohybu roveru Zhurong. Bohužel úplně jednoznačnou trasu, kudy přesně rover jel nemáme. Ověřitelná je pouze do solu 28 ze dvou snímků HiRISE. Další trasu pak můžeme sledovat pouze podle mapek, které zveřejnila CNSA, a podle jednoho snímku z kamery HiRIC, kde je stopa roveru docela dobře viditelná. Trošku problém je ten, že stopa z HiRIC a mapek CNSA se až tak moc nekryje. Vysvětlení neznám, ale napadají mě pouze dva důvody. Buď je mapka CNSA kreslená tak trochu od oka, nebo není dělaná na základě snímků z kamery HiRIC, ale na základě vyhodnocení snímků z NaTeCam a z odometrických dat a se vzdáleností se jim to pak trochu rozjíždí.
Další nesrovnalost vnáší tahle publikace, kde je také vyznačená trasa. Je na ní krátký úsek před solem 91, kde rover zajel výrazně na východ. Tenhle úsek není na mapkách CNSA a ani není viditelný na HiRIC.
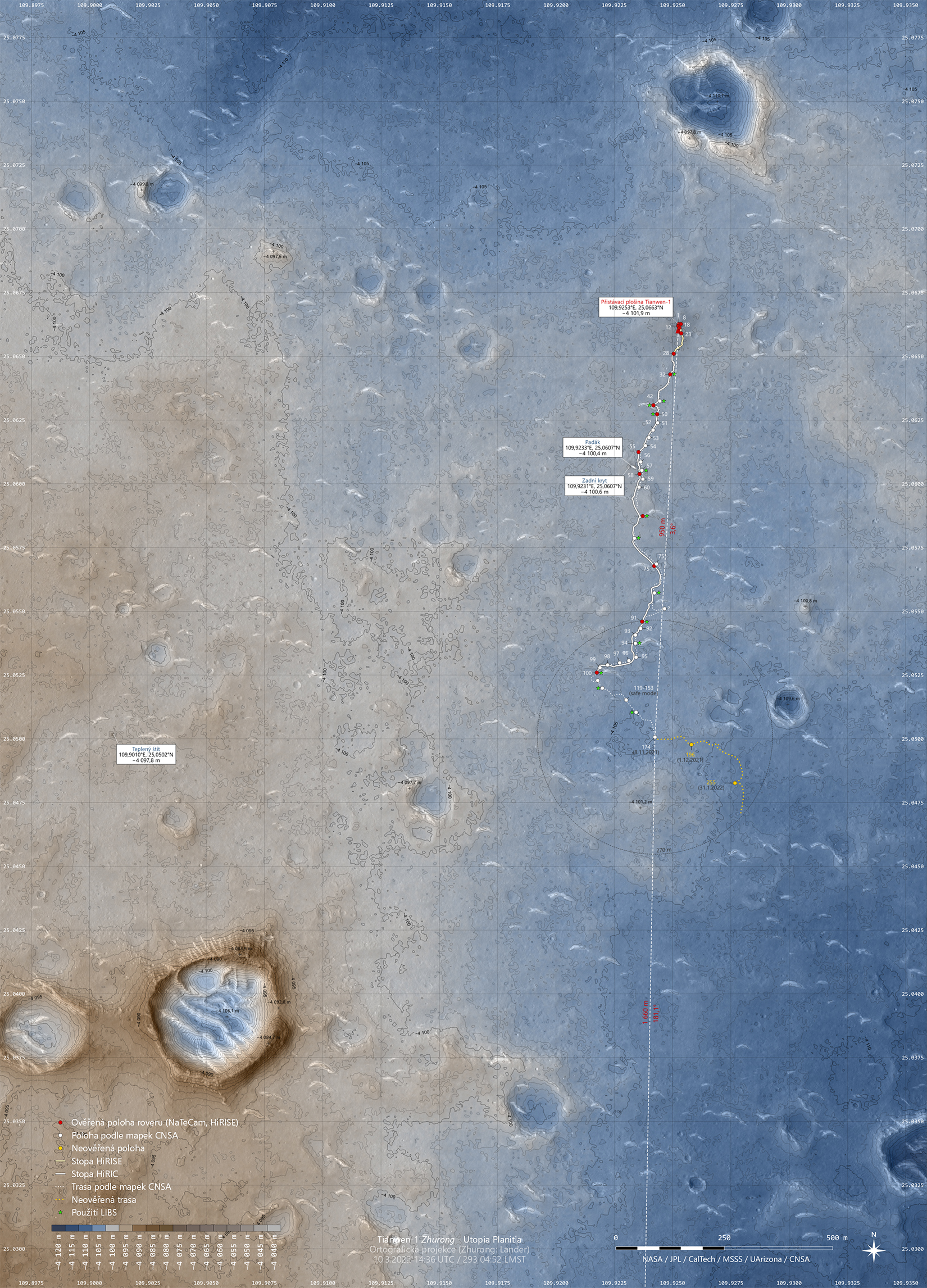
Poslední oficiálně uváděná poloha roveru je z 8.11.2021 (sol 174) kdy rover urazil 1 253 m. Naposledy CNSA informovala o ujeté vzdálenosti 31.01.2022 (sol 255), kdy to bylo 1 524 m. Od solu 174 do solu 255 tedy rover urazil 271 m. Tato vzdálenost je na mapce vyznačena kruhem, který vymezuje oblast, kde se rover může nacházet. Sol 255 podle mapky od uživatele wlr2678 je sice v této oblasti, ale trochu problém je ten, že segment dráhy od solu 174 do solu 255 má délku 292 m a nedopovídá tedy ujeté vzdálenosti podle CNSA. Je tedy nutné tuto část trasy brát jako hodně nejistou.
 |
|
Ještě malé doplnění k uvedené mapce. Trochu mi uniklo, že některé útvary oblasti, kde přistál Zhurong, jsou již pojmenované a jména jsou schválená IAU. Na mapce je ještě zatím nemám uvedené.
Tak velký kráter severně od místa přistání se jmenuje Tianzhushan a velký kráter na jihozápadě se jmenuje Maji. |