|
| Sestavil jsem takový malý přehled o průběhu přistání Zhurongu. Zatím je ve verzi 1, takže některé formulace mohou být trochu zašmodrchané a chybí tam nějaká ta „omáčka“. Je tam i krátké okno mezi 6.5.2020 a 14.5. Tam se mi zatím nepodařily dohledat orbitální manévry TW-1. |
|
Postupně se začíná objevovat řada odborných článků s prvními vědeckými výsledky TW-1. Jeden z nich je o roveru.
Najdeme tam celou řadu informací, které jsme doposud neznali, ale v tom článku je i několik nepřesností a nejasností.
Taková jedna drobnost, spíš to bude jenom omyl, je na obr. 3 (str.13), kde útvar na obzoru je označený jako kráter, ale jedná se ve skutečnosti o ten výrazný plochý kopec, který se na snímcích z NaTeCam často opakuje.
O něco vážnější je ovšem obrázek 2 na straně 12. Obr 2a je mapka CNSA s pohybem roveru. Na téhle zelené puntíky jsou o něco menší a čára trasy je užší, ale jinak je shodná s těmi předešlými mapkami od CNSA a neodpovídá stopě roveru na snímku z HiRIC. Na téhle je navíc u každého navigačního bodu označený sol, kdy rover v daném místě byl. První nejasnost je u navigačního bodu Sol 18. Tenhle bod se kryje s polohou na prvním snímku z HiRISE, který pořídila sonda MRO 6.6.2021 15:23 UTC (15:30 LMST). To byl ovšem rover na Marsu již 23. sol, který je na mapce o pár puntíků vedle ve vzdálenosti 13,5 m.
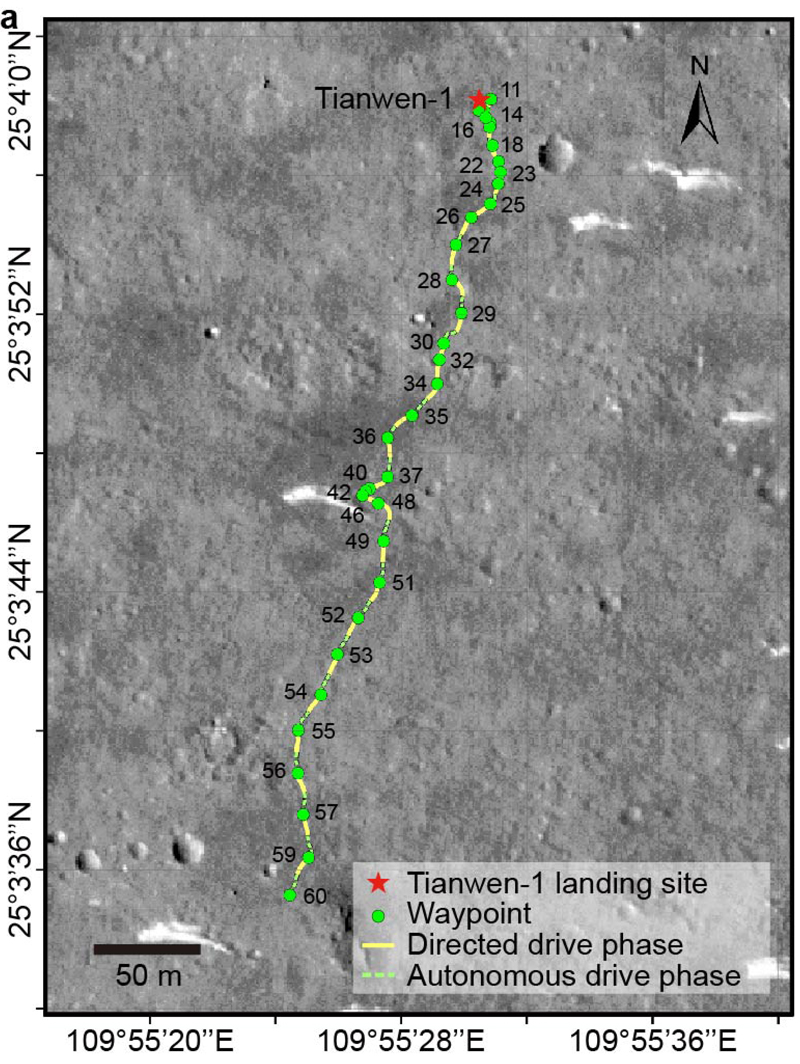
Podruhé vyfotil MRO rover o pět dnů později 11.6.2021 18:47 UTC, což odpovídá Sol 28 15:36 LMST a v tento sol ještě odpoledne byl rover tedy na místě, které je označeno jako sol 27. Je tu samozřejmě možnost, že odpoledne rover přejel do sousedního navigačního bodu. Ten přejezd podle všeho netrvá dlouho. Před nedávnem tu k výročí ujetých 1000 m byl snímek obrazovky z řídícího střediska, kde byla doba jízdy něco přes 22 minut, pokud ten údaj dobře interpretuji, a navigační body jsou od sebe vzdálené kolem 20 m, takže vychází průměrná rychlost zhruba 1m/min, což by mohlo být.
Jenomže je tu ještě jedno pdf, ve kterém je popsaný pracovní režim roveru . V tom článku se píše, že rover je povětšinu marsovského dne v pohotovostním režimu a jeho pracovní činnost probíhá až od 11:00 LMST do 15:00 LMST, kdy teploty vzrostou natolik, že je možné vypnout vyhřívání roveru. 28. sol v 15:36 LMST nebylo slunce nad obzorem již moc vysoko 40,5° a tak se mi moc nezdá, že v tu dobu by se vypravil na cestu. Úplně vyloučené to však není.
Ale ať už vezmeme sol 27 nebo 28, tak těch zelených puntíků od solu 23 je moc a některé tam přebývají, a soly jsou označené nějakým podivným způsobem.
Dalším místem, kde sol neodpovídá, je místo, kde bylo pořízené druhé panorama a na mapce je to sol 30. Mně se podařilo dohledat, že panorama bylo pořízené 16.6. CST, to je ale sol 32. Stejný sol má na svých mapkách Phill Stooke na unmanned spaceflight, ale on čísluje soly od 0, takže tam má 31 a na infografice od wlr2678 je také 16.6, takže je pravděpodobné, že na mapce CNSA je tenhle sol také špatně. Je to ale spíše s jenom otazníkem, to se ještě pokusím znovu dohledat, jak to s tímhle panoramatem, a tedy i se solem, doopravdy je.
Od solu 50 až do solu 60 se rover pohyboval poměrně rychle, a každý sol přejel do dalšího navigačního bodu. Výjimkou je místo, když byl u zadního krytu s padákem. Na stránkách CNSA se píše: „12. července 2021, projelo vozítko Zhurong poblíž komplexu padáku a zadního krytu a pomocí navigační terénní kamery zachytilo společný obrázek…“. 12.7 byl sol 58. Už jsem tady o tom kdysi psal, že pro snímek mi vychází poloha, která neodpovídá ani solu 57, ani solu 59 a navíc leží západněji, než je zobrazovaná trasa roveru. To potvrdil snímek HiRIC, z něho je vidět, že rover projel dokonce ještě o kousek západněji, než vyšlo mně. Podle světelných podmínek byl snímek pořízený v odpoledních hodinách podobně jako ta poslední dvě panoramata, kterým se světelné podmínky tohoto snímku hodně přibližují čili někdy mezi 15:00 až 16:00 LMST. Je to tedy stejné dilema jako u solu 28, takže by to mohlo znamenat, že rover v tomto místě měl zastávku a na mapce puntík chybí. Jistota to samozřejmě není.
Neméně zajímavý ve zmiňovaném pdf je i výškový profil trasy roveru za 60 solů, a který se hodně liší od profilu, který jsem zde uvedl, a který byl vytvořený z HiRISE DTM.
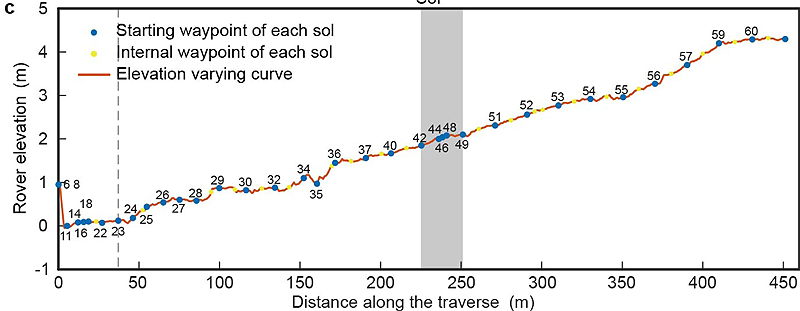

Oproti HiRISE DTM se výškový profil liší v převýšení téměř 5x. Od místa přistání k padáku je to necelých 4,5 m, což vůbec neodpovídá DTM z HiRISE. Podle něj podél trasy roveru takové převýšení není, ať vezmeme tu špatnou nebo tu skutečnou trasu z HiRIC.
Jedna z možností, která mě napadá, a která by mohla být příčinou tohoto rozdílu, je snímek trasy roveru z HiRIC, který nejde dobře překrýt s HiRISE a hodně se rozjíždí. Pokud by to byla nějaká systematická chyba ve zpracování, tak zpracováním stereoprárů by vyšla i chybná elevace.
Ale pak je tu i hodně nezanedbatelná možnost, že něco dělám špatně já, ačkoliv v tuhle chvíli nevím kde. Rozhodně si nejsem jistý, že to dělám správně, spíš mám o tom často pochybnosti. 
[upraveno 3.10.2021 20:29] |
| 03.10.2021 - 20:51 - MiraH | |
|
citace 3.10.2021 - 19:21 - Honza Vacek:
Ale pak je tu i hodně nezanedbatelná možnost, že něco dělám špatně já, ačkoliv v tuhle chvíli nevím kde. Rozhodně si nejsem jistý, že to dělám správně, spíš mám o tom často pochybnosti.
Záhady to jistě jsou. Bylo by určitě lepší, kdyby se výsledky shodovaly. Ale Číňané jsou dost velcí tajnůstkáři. Já bych řekl, že Vaše výsledky jsou dostatečně přesné. Normálně bych sem do vlákna přispíval mapami od Phila Stookeho, ale Vaše práce je tak originální, že to nedělám, abych Vám "nekonkuroval". I kdyby byla nepřesnost na Vaší straně, tak to dělejte dál. Pokud Vám to teda čas dovolí a máte radost z této práce. I informace, že se rozcházíte s informacemi z jiných zdrojů je přínosná. Těch informací je tuze málo, takže já Vaše mapy vítám. Úplně ne vždy chápu postup, jakým mapy tvoříte, ale Vy tomu evidentně rozumíte. Vaše mapy jsou Váš originální produkt a není to jen převzato z jiných zdrojů (jak bych to udělal já), takže za mě máte palec nahoru  a díky za informace. a díky za informace. |
|
citace 3.10.2021 - 20:51 - MiraH:
Normálně bych sem do vlákna přispíval mapami od Phila Stookeho
Klidně je sem dávejte, porovnání je vždycky potřeba a Philip Stooke je v tomhle profík a já se na něho také občas odvolávám.
Pro ty, kdo Philipa Stooka neznají. Je profesně planetární kartograf. Působí na University of Western Ontario v Londýně v Kanadě na katedře kartografie. Specializuje se na mapování a mapové projekce nepravidelných těles, jako jsou asteroidy a také na Mars. Je autorem celé řady atlasů Marsu.
Takže Philip Stooke je trochu jiná liga než já. |
|
Komunikace s orbiterem a s roverem bude obnovena v polovině října, čili zhruba ve stejnou dobu, kdy NASA obnoví komunikaci se svými sondami. Výpadek spojení tedy bude kratší než 50 dnů, jak původně uváděla CNSA.
https://mp.weixin.qq.com/s/XKsKN1dXMVwlmNw0aSqaSQ |
|
Doufejme, že po skončení sluneční konjunkce budou všechny orbitery i rovery v pořádku, a tedy i TW-1 a Zhurong. Podle tohoto článku, který je staršího data, by mohl být jedním z větších cílů velký kráter o průměru ~300 m vzdálený od současné polohy 1 070 m jihozápadním směrem (v textu kráter A).
V článku je uvedeno, že východní sedlo valu kráteru by mělo být pro rover dobře přístupné a umožňuje i vjezd přímo do kráteru. Podle dosavadní rychlosti i směru postupu roveru by ke kráteru mohl dorazit podle mého odhadu za 2,5 měsíce, tedy koncem roku nebo začátkem ledna.
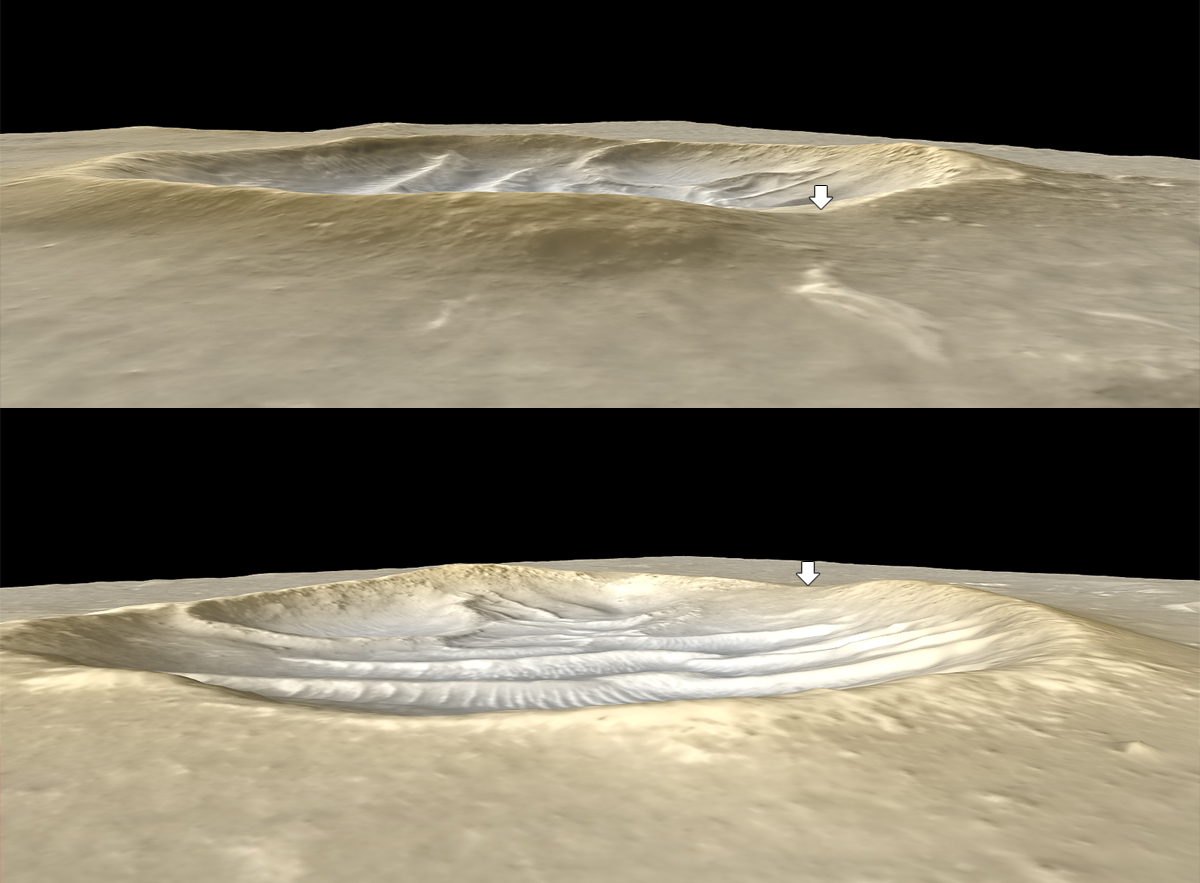
A nakonec ještě pohled na východní sedlo kráteru
[upraveno 8.10.2021 22:37] |
|
| https://twitter.com/MarsTianwen/status/1446756147017383938
|
|
Ještě jenom krátce ke kráteru z předešlého příspěvku. Kráter A je v uvedeném článku zmiňován jako jeden z možných cílů a je i zmíněno, že východním sedlem by rover mohl vjet přímo do kráteru.
Tady je tedy trochu detailnější pohled na kráter. Výškový profil v grafu nahoře je měřený podél bílé čárkované linie vedoucí přes sedlo valu kráteru. Tenčí čára pak ukazuje sklon povrchu ve stupních. Vrstevnice mají interval 1m.
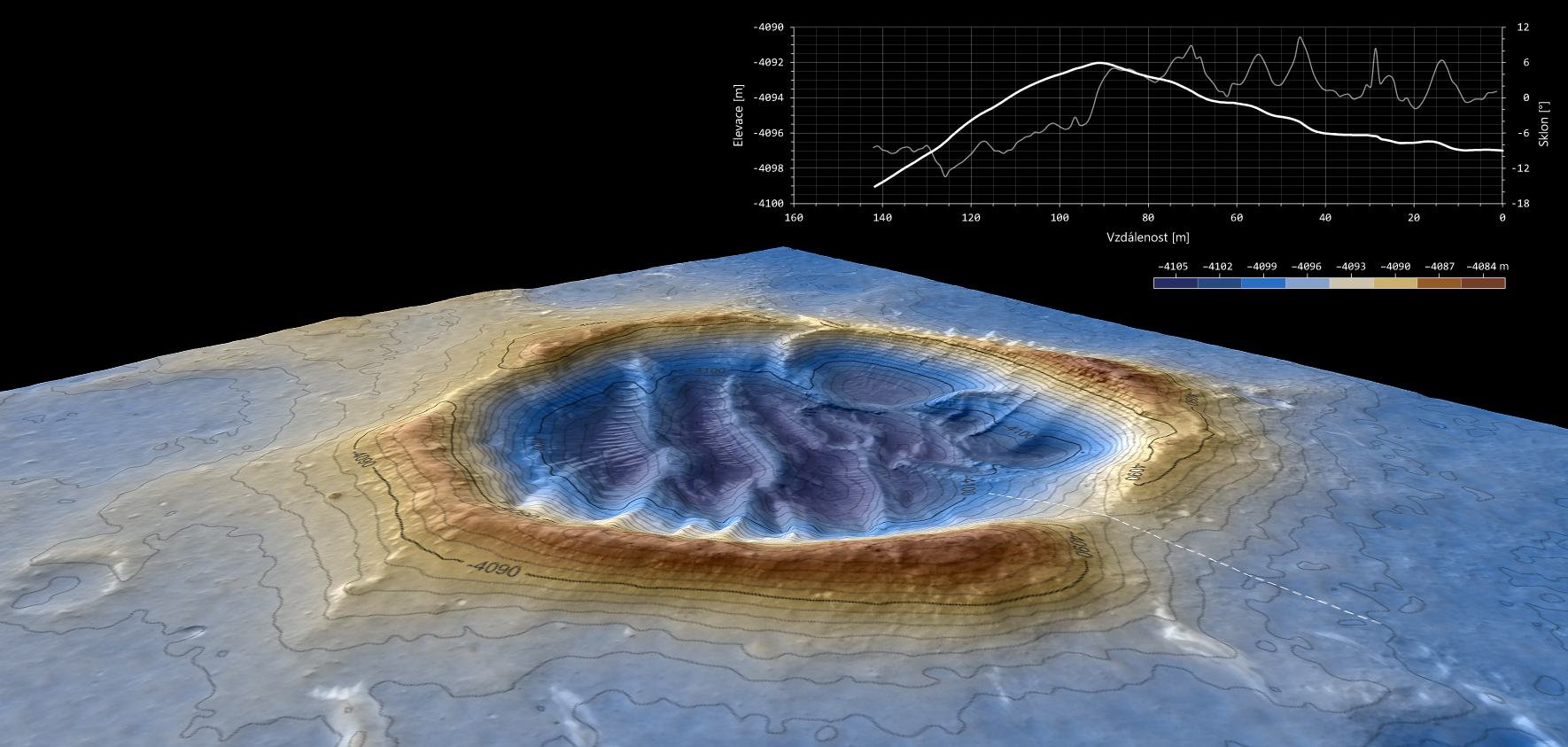
Rover Zhurong může překonávat náklon povrchu do ±30° pokud je povrch pevný a do ±20° pro měkký povrch. Cesta přes sedlo nemá větší náklon než +10° a není menší než −14°. Vjezd do kráteru by tedy teoreticky mohl být možný, ale hodně bude záviset na materiálu, kterým je tvořený val kráteru. |
|
Hm, tak jen co jsem tu zmínil velký kráter jako jeden z možných cílů, tak jsem narazil na novější informaci ze včerejška, že do kráteru se nejspíše nepojede. Podle tohoto videa
https://twitter.com/i/status/1447033285859708931
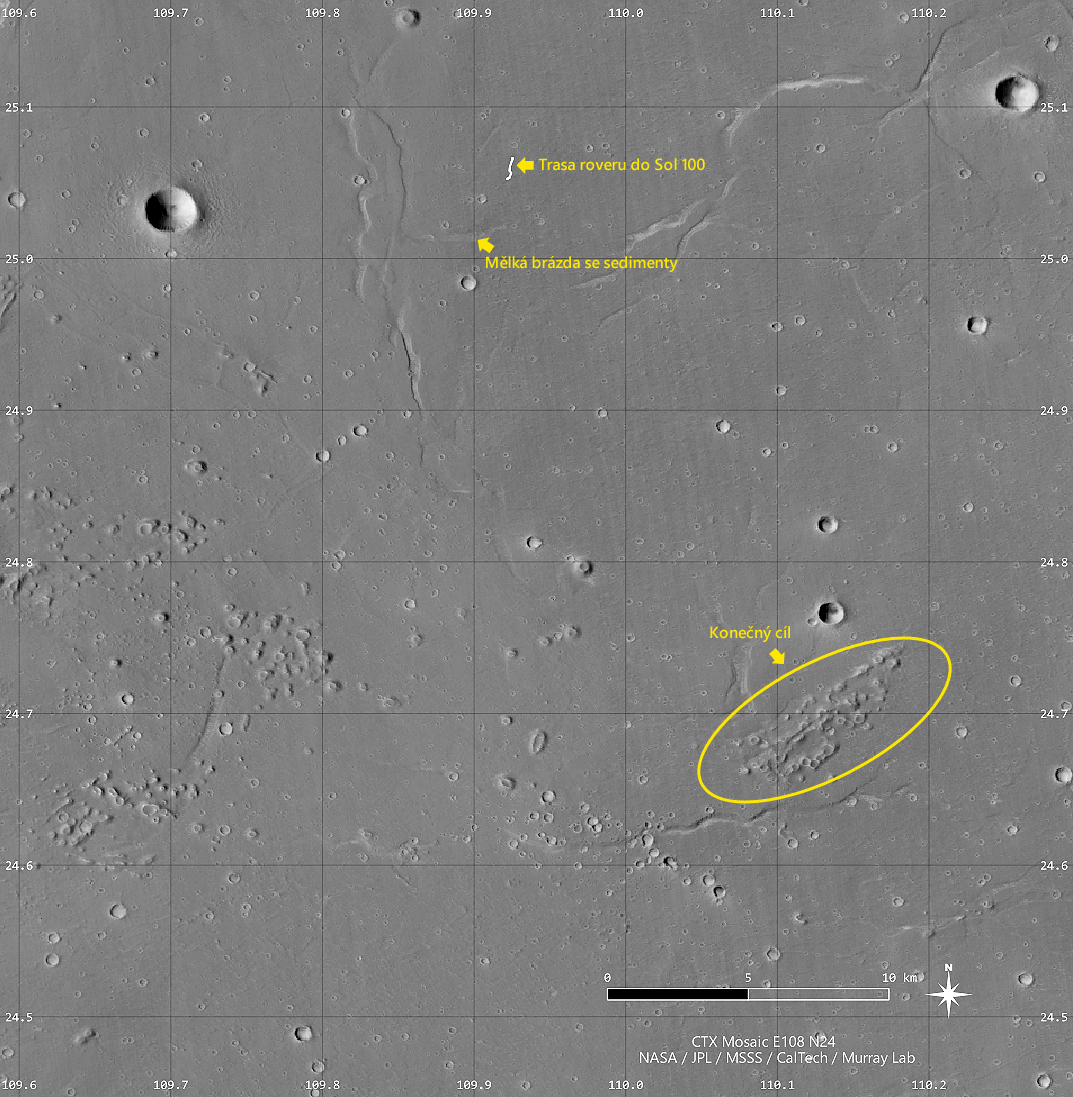
tým roveru doufá, pokud tomu stav roveru dovolí, že rover dojede až do vulkanické oblasti, která je vzdálená 20 km jižně. Na obrázku s přistávacími elipsami je to oblast vyznačená červeně v pravé dolní části levé bílé elipsy. První větší zastávkou by měla být mělká brázda přibližně 2 km jižně od současné pozice, která by měla být bohatá na sedimenty. Aspoň si myslím, že se jedná o brázdu, protože překladač z čínštiny to přeložil jako "sedimentární hromadu písku", ale na videu ukazují právě na tu brázdu. |
|
| Máme i HiRISE snímek oblasti, kterou by měl rover projet. |
|
Přikládám ještě mapku k uvedenému videu
 |
|
| Tahle mapka je opravdu jasná a přehledná. Lepší jsem asi nikdy neviděl. Konečně chápu souvislosti a vidím ty relativní vzdálenosti a směry. Díky, Honzo. |
|
citace 11.10.2021 - 22:47 - Aleš Holub:
Tahle mapka je opravdu jasná a přehledná. Lepší jsem asi nikdy neviděl. Konečně chápu souvislosti a vidím ty relativní vzdálenosti a směry. Díky, Honzo.
Aleši, není zač. Jsem jenom rád, když to, co občas vytvořím nebo na co narazím a dám to sem, tak někomu aspoň trošku pomůže udělat si o téhle misi obrázek. |
|
Tento článek potvrzuje, že k pokusu o navázání spojení s orbiterem i roverem dojde v polovině října, tedy koncem tohoto týdne. Přesný datum, kdy se tak stane, v článku uveden není. Skoro jistě to ale nebude před 16.10., kdy spojení se svými sondami začne obnovovat NASA.
A protože obrázků z roveru zase až tak moc není, dávám sem obrázek, který je v článku (jenom odkaz, náhled se mi tu nechce zobrazit).
https://wx4.sinaimg.cn/large/00686eaKgy1gvbkzpaxlqj60tw18x7cn02.jpg
Tento obrázek jsme však už viděli. Je to jeden z 12 snímků, ze kterého je složeno poslední panorama, které bylo pořízené ve 100. sol někdy kolem 16:00 LMST. Ve stejný sol, ale v dopoledních hodinách, zachytila rover kamera HiRIC (v tu dobu byl už rover zhruba na stejném místě, kde pak pořídil snímky panoramatu). Je to už tady zmiňovaný snímek, na kterém je stopa roveru.
[upraveno 12.10.2021 17:39] |
|
| Rover Zhurong je dneškem již 150. sol na povrchu Marsu. |
|
Dva snímky, které tady ještě nebyly a ne zrovna dobré kvality, snad se objeví časem lepší. NaTeCam a HazCam zachytily wifi kameru odloženou na povrch Marsu, kterou bylo pořízeno selfie 1.6.2021 (18.sol).
 |
|
Po 35 dnech byl obnovený kontakt s orbiterem TW-1, který byl přerušený mezi 13.9. a 18.10. v důsledku sluneční konjunkce s Marsem. Podle všeho se zdá, že orbiter, a snad i rover jsou v dobrém stavu. Obnovení komunikace potvrzují i radioamatérská sledování orbiteru.
Rover by se nyní měl vydat na dlouhou cestu k bahenním sopkám na jihovýchodě a orbiter by měl změnit svoji oběžnou dráhu na vědeckou, ze které začne snímkovat povrch a provádět další vědecká měření. Kontakt s roverem z nové oběžné dráhy už ale nebude tak častý, jako doposud, kdy nad roverem prolétal orbiter 2x za marsovský den (kolem poledne v pericentru a kolem půlnoci v apocentru) a dráha tak byla optimalizovaná pro optimální kontakt s roverem na povrchu. |
|
| Tento článek potvrzuje, že orbiter i rover se vrátily do normálního pracovního režimu. Navíc upřesňuje, že orbiter přejde na novou oběžnou dráhu počátkem listopadu. |
|
Ještě malé doplnění k předchozím příspěvkům. Původně CNSA plánovala přerušit spojení s TW-1 na 50 dnů a k přerušení komunikace došlo 13. září. NASA přerušila spojení se svými sondami později a pouze na dva týdny. Důvod tohoto rozdílu je ten, že CNSA neměla žádné zkušenosti s tím, jaký bude mít vliv sluneční konjunkce na komunikaci. K přerušení komunikace však nedošlo úplně, což potvrzuje i AMSAT-DL, pouze nebyly vysílány povely sondám, ale byl monitorovaný stav orbiteru a roveru.
Během konjunkce byl prováděn výzkum vlivu sluneční konjunkce na spojení se sondami, do kterého se zapojila i řada zahraničních vědeckých institucí a radioteleskopů v Austrálii, Rusku, Jižní Africe, a v dalších zemích, dále evropský VLBI a ESA se svou sondou Mars Express. Kromě toho se například sledovaly i fluktuace hustoty elektronů způsobené slunečním větrem v meziplanetárním prostoru.
Průběžným vyhodnocením získaných dat, kterých bylo získáno celkem 5TB, pak bylo možné zkrátit období přerušení komunikace z 50 na 35 dnů, což bylo oznámeno počátkem října.
|
|
Před časem tady byla zmínka o čínském znaku, který jehož vzor má rover na zadních kolech, a tak ho tiskne ho do stopy, kterou za sebou zanechává. Podle tohoto článku má tisk i praktický účel. Obvod kola roveru je 1 m, čili i vzdálenost mezi znaky ve stopě je také 1m. Pokud by se vzdálenost mezi znaky zkracovala, znamenalo by to, že dochází k prokluzu kol, například proto, že rover zrovna nejede po pevné půdě. To by mohl být jeden z prvních signálu, že rover by mohl zapadnout.
A obrázek, který tady ještě nebyl.
 |
|
 |
|
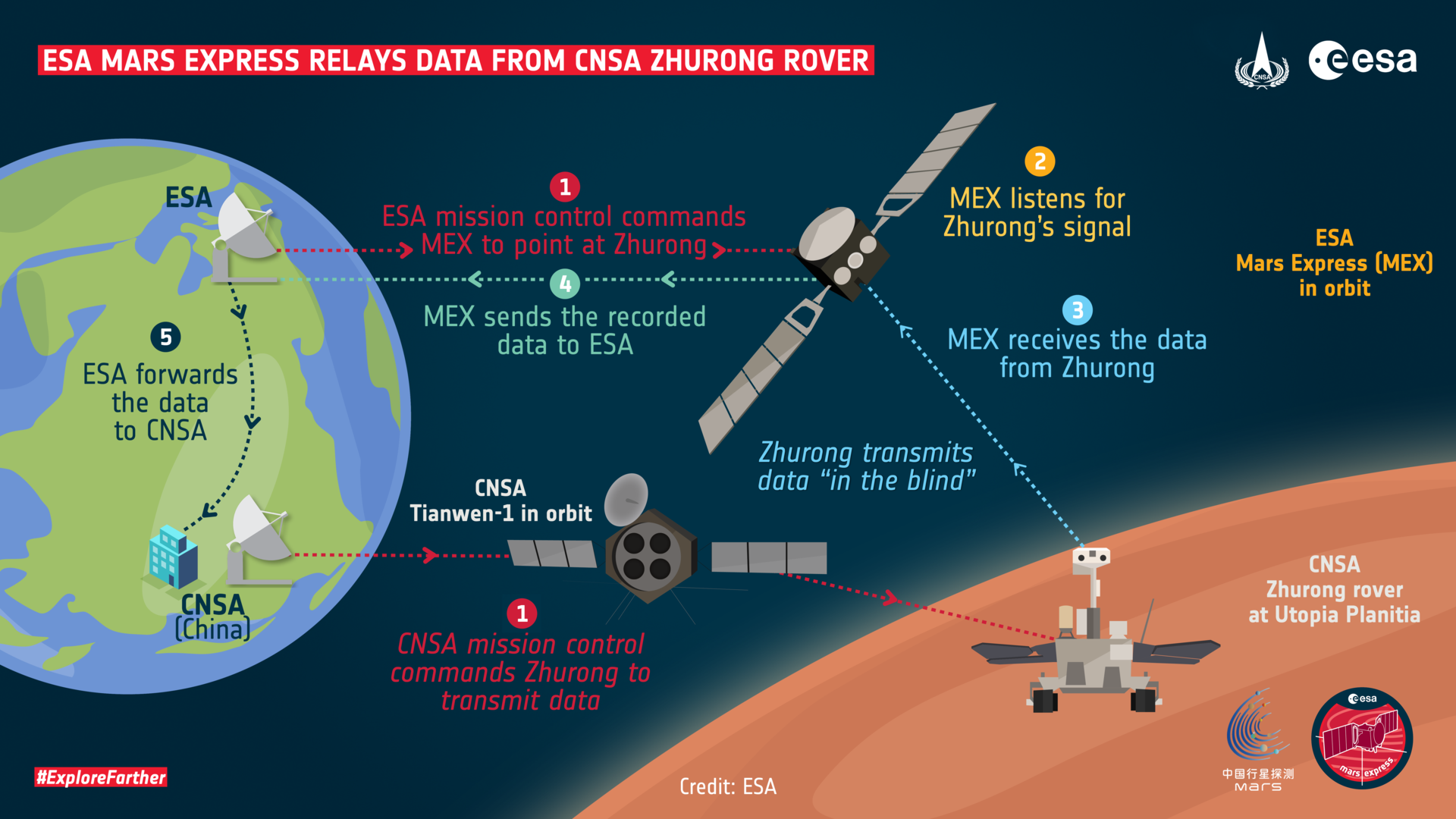
V průběhu listopadu proběhne pět testů přenosu dat z roveru Zhurong prostřednictvím sondy Mars Express. Nebude to ale jednoduché. MarsExpress je sice schopen přijmout data z roveru, ale rover nemůže přijímat data z ME. Přenos dat tedy proběhne naslepo a zatím při nízkých přenosových rychlostech 8 kbit/s a 128 kbit/s. Rover začne vysílat v okamžiku kdy se otevře komunikační okno a ME naopak bude pouze přijímat data. Tato technologie přenosu dat je odzkoušena na Zemi, ale zatím nebyla použita ve vesmíru.
Celý článek. |
|
Byl zveřejněný další snímek selfie z 1.6.2021
 |
|
Dnes je Zhurong na Marsu 174.sol a k tomuto datu urazil celkovou vzdálenost 1253 m. Pokračuje v cestě stále na jih.
Dnes také orbiter Tianwen-1 opustil oběžnou dráhu, která byla optimalizovaná pro komunikaci s roverem na povrchu, a přešel na novou orbitu, ze které bude provádět dálkový průzkum Marsu. |
|
| Ještě malé upřesnění. Nová orbitální dráha má periodu přibližně 7,08 h, je tedy o ~1.12 hodiny kratší než dosavadní. Pericentrum dráhy leží ve výšce 265 km, apocentrum ve výšce 10 700 km. |
|
Nová oběžná dráha, na které sonda bude pracovat minimálně dalších 14 měsíců, umožní pokrýt snímky celý povrch Marsu za 200 dní. Také bude poprvé použitý podpovrchový radar, který je umístěný na orbiteru.
Na roveru podpovrchový radar pracoval nepřetržitě pouze během jízdy. Při zastávkách byl vypnutý. |
|
| První z pěti testů přenosu dat z roveru Zhurong prostřednictvím evropské sondy Mars Express proběhl v neděli 7. listopadu. Vyhodnocení pak mělo proběhnout ve středu. Výsledek testu ale zatím nebyl zveřejněný. |
|
| Přenos dat z roveru Zhurong prostřednictvím evropské sondy Mars Express se podařil. V listopadu mělo proběhnou celkem pět zkoušek přenesení dat z roveru přes Mars Express, ale jestli proběhly všechny, zatím není známo. Komunikační vzdálenost mezi roverem a orbiterem MEX byla 4000 km a komunikační okno trvalo kolem 10 min. |
|
Úspěch přenosu dat z roveru Zhurong přes Mars Express potvrdila i ESA.
Zmíněných pět testů mělo proběhnout ve dnech:
07.11.2021 12:07–12:17 UTC
16.11.2021 19:34–19:44 UTC
18.11.2021 20:27–20:37 UTC
20.11.2021 21:20–21:27 UTC
22.11.2021 22:13–22:22 UTC
Kolik přesně proběhlo pokusů o přenos dat zatím není jasné, ale víme, že první test proběhl 7.11. a úspěšný byl až ten z 20.11.

[upraveno 1.12.2021 17:56] |
|
| Dnes ve 20:14:21 UTC začne rover Zhurong svůj 200. sol na povrchu Marsu (vztaženo k LMST v místě přistání). Podle MT, který používá řídící středisko by to mělo být ve 19:58:16 UTC, ale tady ani po těch mnoha měsících si nejsem úplně jistý algoritmem pro výpočet MT, jaký používají pro Zhurong v CNSA. Tak doufejme, že k 200. solu se objeví i nějaké nové informace. |